 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraSP-VLA: Graph-based Symbolic Action Representation for Long-Horizon Planning with VLA Policies
Nov 06, 2025Deploying autonomous robots that can learn new skills from demonstrations is an important challenge of modern robotics. Existing solutions often apply end-to-end imitation learning with Vision-Language Action (VLA) models or symbolic approaches with Action Model Learning (AML). On the one hand, current VLA models are limited by the lack of high-level symbolic planning, which hinders their abilities in long-horizon tasks. On the other hand, symbolic approaches in AML lack generalization and scalability perspectives. In this paper we present a new neuro-symbolic approach, GraSP-VLA, a framework that uses a Continuous Scene Graph representation to generate a symbolic representation of human demonstrations. This representation is used to generate new planning domains during inference and serves as an orchestrator for low-level VLA policies, scaling up the number of actions that can be reproduced in a row. Our results show that GraSP-VLA is effective for modeling symbolic representations on the task of automatic planning domain generation from observations. In addition, results on real-world experiments show the potential of our Continuous Scene Graph representation to orchestrate low-level VLA policies in long-horizon tasks.
Real-Time Scene Graph Generation
May 25, 2024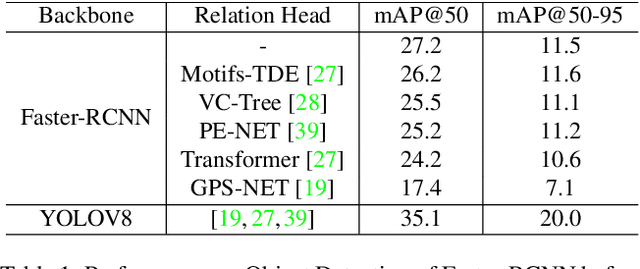



Scene Graph Generation (SGG) can extract abstract semantic relations between entities in images as graph representations. This task holds strong promises for other downstream tasks such as the embodied cognition of an autonomous agent. However, to power such applications, SGG needs to solve the gap of real-time latency. In this work, we propose to investigate the bottlenecks of current approaches for real-time constraint applications. Then, we propose a simple yet effective implementation of a real-time SGG approach using YOLOV8 as an object detection backbone. Our implementation is the first to obtain more than 48 FPS for the task with no loss of accuracy, successfully outperforming any other lightweight approaches. Our code is freely available at https://github.com/Maelic/SGG-Benchmark.
Commonsense Reasoning for Identifying and Understanding the Implicit Need of Help and Synthesizing Assistive Actions
Feb 23, 2022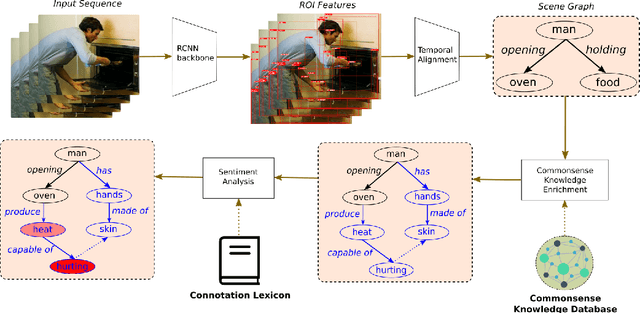
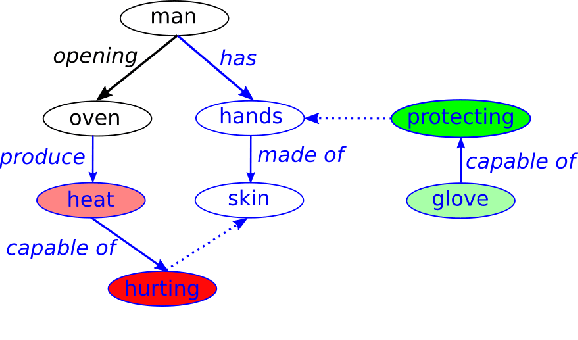
Human-Robot Interaction (HRI) is an emerging subfield of service robotics. While most existing approaches rely on explicit signals (i.e. voice, gesture) to engage, current literature is lacking solutions to address implicit user needs. In this paper, we present an architecture to (a) detect user implicit need of help and (b) generate a set of assistive actions without prior learning. Task (a) will be performed using state-of-the-art solutions for Scene Graph Generation coupled to the use of commonsense knowledge; whereas, task (b) will be performed using additional commonsense knowledge as well as a sentiment analysis on graph structure. Finally, we propose an evaluation of our solution using established benchmarks (e.g. ActionGenome dataset) along with human experiments. The main motivation of our approach is the embedding of the perception-decision-action loop in a single architecture.