 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Expansion and enhanced Compression for Class Incremental Learning
May 13, 2024Class incremental learning consists in training discriminative models to classify an increasing number of classes over time. However, doing so using only the newly added class data leads to the known problem of catastrophic forgetting of the previous classes. Recently, dynamic deep learning architectures have been shown to exhibit a better stability-plasticity trade-off by dynamically adding new feature extractors to the model in order to learn new classes followed by a compression step to scale the model back to its original size, thus avoiding a growing number of parameters. In this context, we propose a new algorithm that enhances the compression of previous class knowledge by cutting and mixing patches of previous class samples with the new images during compression using our Rehearsal-CutMix method. We show that this new data augmentation reduces catastrophic forgetting by specifically targeting past class information and improving its compression. Extensive experiments performed on the CIFAR and ImageNet datasets under diverse incremental learning evaluation protocols demonstrate that our approach consistently outperforms the state-of-the-art . The code will be made available upon publication of our work.
PID Tuning using Cross-Entropy Deep Learning: a Lyapunov Stability Analysis
Apr 18, 2024Underwater Unmanned Vehicles (UUVs) have to constantly compensate for the external disturbing forces acting on their body. Adaptive Control theory is commonly used there to grant the control law some flexibility in its response to process variation. Today, learning-based (LB) adaptive methods are leading the field where model-based control structures are combined with deep model-free learning algorithms. This work proposes experiments and metrics to empirically study the stability of such a controller. We perform this stability analysis on a LB adaptive control system whose adaptive parameters are determined using a Cross-Entropy Deep Learning method.
Sim-to-Real Transfer of Adaptive Control Parameters for AUV Stabilization under Current Disturbance
Oct 17, 2023Learning-based adaptive control methods hold the premise of enabling autonomous agents to reduce the effect of process variations with minimal human intervention. However, its application to autonomous underwater vehicles (AUVs) has so far been restricted due to 1) unknown dynamics under the form of sea current disturbance that we can not model properly nor measure due to limited sensor capability and 2) the nonlinearity of AUVs tasks where the controller response at some operating points must be overly conservative in order to satisfy the specification at other operating points. Deep Reinforcement Learning (DRL) can alleviates these limitations by training general-purpose neural network policies, but applications of DRL algorithms to AUVs have been restricted to simulated environments, due to their inherent high sample complexity and distribution shift problem. This paper presents a novel approach, merging the Maximum Entropy Deep Reinforcement Learning framework with a classic model-based control architecture, to formulate an adaptive controller. Within this framework, we introduce a Sim-to-Real transfer strategy comprising the following components: a bio-inspired experience replay mechanism, an enhanced domain randomisation technique, and an evaluation protocol executed on a physical platform. Our experimental assessments demonstrate that this method effectively learns proficient policies from suboptimal simulated models of the AUV, resulting in control performance 3 times higher when transferred to a real-world vehicle, compared to its model-based nonadaptive but optimal counterpart.
Learning-based vs Model-free Adaptive Control of a MAV under Wind Gust
Jan 29, 2021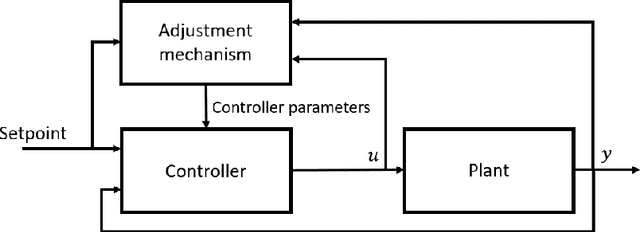
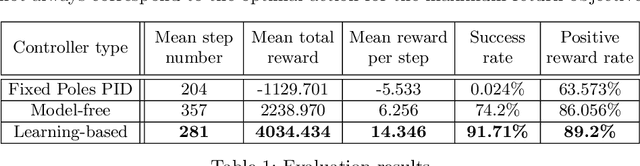
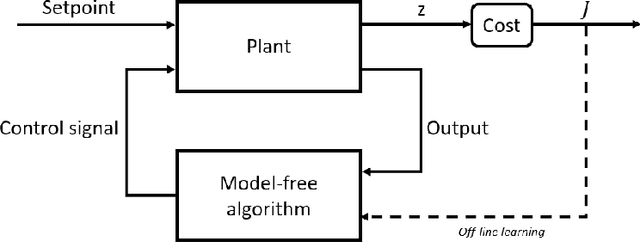
Navigation problems under unknown varying conditions are among the most important and well-studied problems in the control field. Classic model-based adaptive control methods can be applied only when a convenient model of the plant or environment is provided. Recent model-free adaptive control methods aim at removing this dependency by learning the physical characteristics of the plant and/or process directly from sensor feedback. Although there have been prior attempts at improving these techniques, it remains an open question as to whether it is possible to cope with real-world uncertainties in a control system that is fully based on either paradigm. We propose a conceptually simple learning-based approach composed of a full state feedback controller, tuned robustly by a deep reinforcement learning framework based on the Soft Actor-Critic algorithm. We compare it, in realistic simulations, to a model-free controller that uses the same deep reinforcement learning framework for the control of a micro aerial vehicle under wind gust. The results indicate the great potential of learning-based adaptive control methods in modern dynamical systems.
Learning sparse structures for physics-inspired compressed sensing
Nov 27, 2020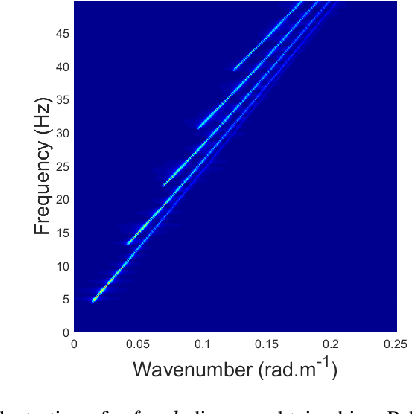
In underwater acoustics, shallow water environments act as modal dispersive waveguides when considering low-frequency sources. In this context, propagating signals can be described as a sum of few modal components, each of them propagating according to its own wavenumber. Estimating these wavenumbers is of key interest to understand the propagating environment as well as the emitting source. To solve this problem, we proposed recently a Bayesian approach exploiting a sparsity-inforcing prior. When dealing with broadband sources, this model can be further improved by integrating the particular dependence linking the wavenumbers from one frequency to the other. In this contribution, we propose to resort to a new approach relying on a restricted Boltzmann machine, exploited as a generic structured sparsity-inforcing model. This model, derived from deep Bayesian networks, can indeed be efficiently learned on physically realistic simulated data using well-known and proven algorithms.