 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProTIP: Probabilistic Robustness Verification on Text-to-Image Diffusion Models against Stochastic Perturbation
Feb 23, 2024



Text-to-Image (T2I) Diffusion Models (DMs) have shown impressive abilities in generating high-quality images based on simple text descriptions. However, as is common with many Deep Learning (DL) models, DMs are subject to a lack of robustness. While there are attempts to evaluate the robustness of T2I DMs as a binary or worst-case problem, they cannot answer how robust in general the model is whenever an adversarial example (AE) can be found. In this study, we first introduce a probabilistic notion of T2I DMs' robustness; and then establish an efficient framework, ProTIP, to evaluate it with statistical guarantees. The main challenges stem from: i) the high computational cost of the generation process; and ii) determining if a perturbed input is an AE involves comparing two output distributions, which is fundamentally harder compared to other DL tasks like classification where an AE is identified upon misprediction of labels. To tackle the challenges, we employ sequential analysis with efficacy and futility early stopping rules in the statistical testing for identifying AEs, and adaptive concentration inequalities to dynamically determine the "just-right" number of stochastic perturbations whenever the verification target is met. Empirical experiments validate the effectiveness and efficiency of ProTIP over common T2I DMs. Finally, we demonstrate an application of ProTIP to rank commonly used defence methods.
Domain Knowledge Distillation from Large Language Model: An Empirical Study in the Autonomous Driving Domain
Jul 17, 2023



Engineering knowledge-based (or expert) systems require extensive manual effort and domain knowledge. As Large Language Models (LLMs) are trained using an enormous amount of cross-domain knowledge, it becomes possible to automate such engineering processes. This paper presents an empirical automation and semi-automation framework for domain knowledge distillation using prompt engineering and the LLM ChatGPT. We assess the framework empirically in the autonomous driving domain and present our key observations. In our implementation, we construct the domain knowledge ontology by "chatting" with ChatGPT. The key finding is that while fully automated domain ontology construction is possible, human supervision and early intervention typically improve efficiency and output quality as they lessen the effects of response randomness and the butterfly effect. We, therefore, also develop a web-based distillation assistant enabling supervision and flexible intervention at runtime. We hope our findings and tools could inspire future research toward revolutionizing the engineering of knowledge-based systems across application domains.
Visual Sensor Pose Optimisation Using Rendering-based Visibility Models for Robust Cooperative Perception
Jun 09, 2021
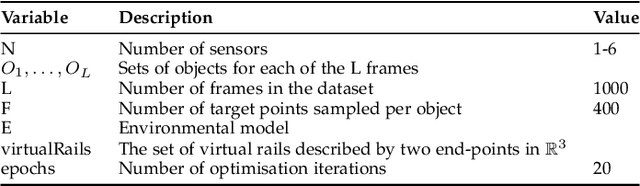
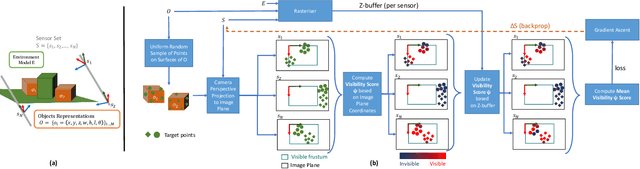
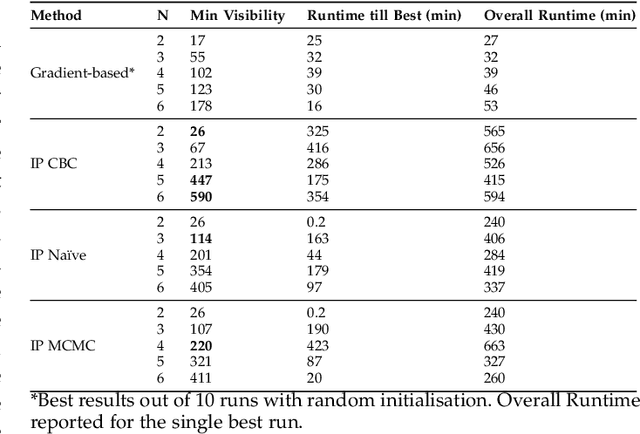
Visual Sensor Networks can be used in a variety of perception applications such as infrastructure support for autonomous driving in complex road segments. The pose of the sensors in such networks directly determines the coverage of the environment and objects therein, which impacts the performance of applications such as object detection and tracking. Existing sensor pose optimisation methods in the literature either maximise the coverage of ground surfaces, or consider the visibility of the target objects as binary variables, which cannot represent various degrees of visibility. Such formulations cannot guarantee the visibility of the target objects as they fail to consider occlusions. This paper proposes two novel sensor pose optimisation methods, based on gradient-ascent and Integer Programming techniques, which maximise the visibility of multiple target objects in cluttered environments. Both methods consider a realistic visibility model based on a rendering engine that provides pixel-level visibility information about the target objects. The proposed methods are evaluated in a complex environment and compared to existing methods in the literature. The evaluation results indicate that explicitly modelling the visibility of target objects is critical to avoid occlusions in cluttered environments. Furthermore, both methods significantly outperform existing methods in terms of object visibility.
Deep Learning-based Vehicle Behaviour Prediction For Autonomous Driving Applications: A Review
Dec 25, 2019
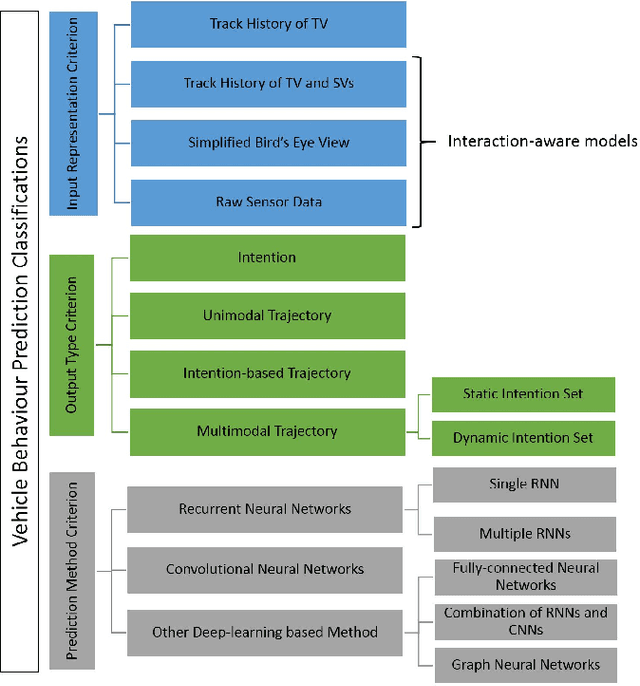

Behaviour prediction function of an autonomous vehicle predicts the future states of the nearby vehicles based on the current and past observations of the surrounding environment. This helps enhance their awareness of the imminent hazards. However, conventional behaviour prediction solutions are applicable in simple driving scenarios that require short prediction horizons. Most recently, deep learning-based approaches have become popular due to their superior performance in more complex environments compared to the conventional approaches. Motivated by this increased popularity, we provide a comprehensive review of the state-of-the-art of deep learning-based approaches for vehicle behaviour prediction in this paper. We firstly give an overview of the generic problem of vehicle behaviour prediction and discuss its challenges, followed by classification and review of the most recent deep learning-based solutions based on three criteria: input representation, output type, and prediction method. The paper also discusses the performance of several well-known solutions, identifies the research gaps in the literature and outlines potential new research directions.