 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning-based Vehicle Behaviour Prediction For Autonomous Driving Applications: A Review
Paper and Code
Dec 25, 2019
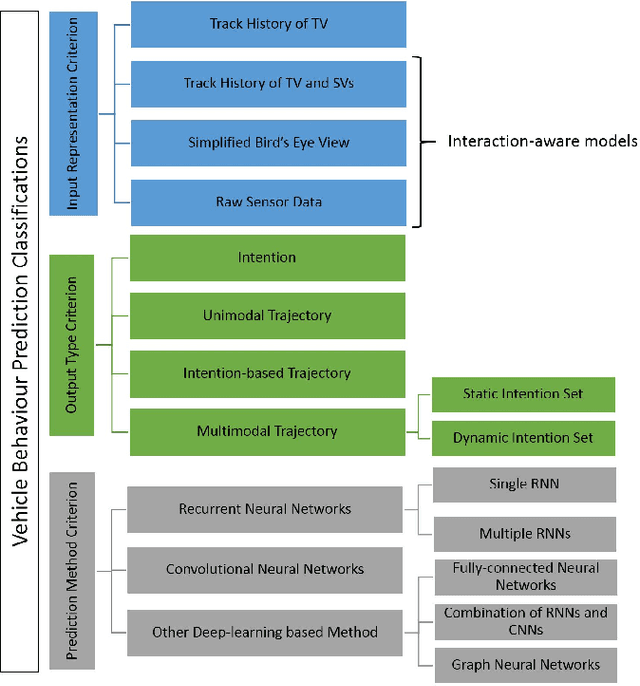

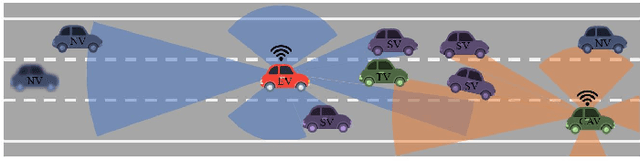
Behaviour prediction function of an autonomous vehicle predicts the future states of the nearby vehicles based on the current and past observations of the surrounding environment. This helps enhance their awareness of the imminent hazards. However, conventional behaviour prediction solutions are applicable in simple driving scenarios that require short prediction horizons. Most recently, deep learning-based approaches have become popular due to their superior performance in more complex environments compared to the conventional approaches. Motivated by this increased popularity, we provide a comprehensive review of the state-of-the-art of deep learning-based approaches for vehicle behaviour prediction in this paper. We firstly give an overview of the generic problem of vehicle behaviour prediction and discuss its challenges, followed by classification and review of the most recent deep learning-based solutions based on three criteria: input representation, output type, and prediction method. The paper also discusses the performance of several well-known solutions, identifies the research gaps in the literature and outlines potential new research directions.