 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Optimum Enumerative Sphere Shaping Blocklength at Different Symbol Rates for the Nonlinear Fiber Channel
Jul 08, 2022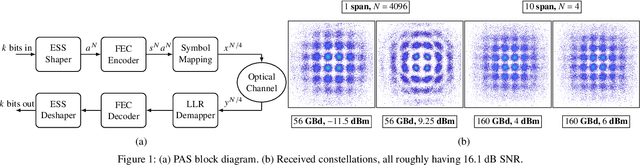
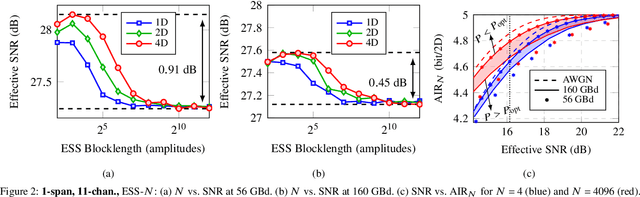
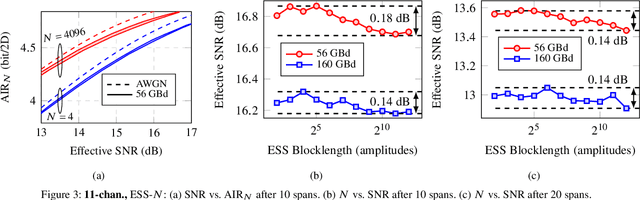
We show that a 0.9 dB SNR improvement can be obtained via short-blocklength enumerative sphere shaping for single-span transmission at 56 GBd. This gain vanishes for higher symbol rates and a larger number of spans.
Introducing 4D Geometric Shell Shaping
Jun 07, 2022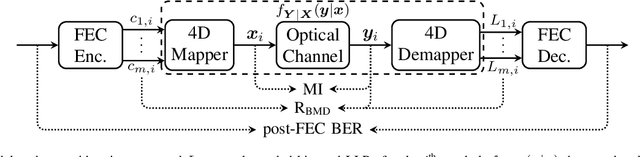
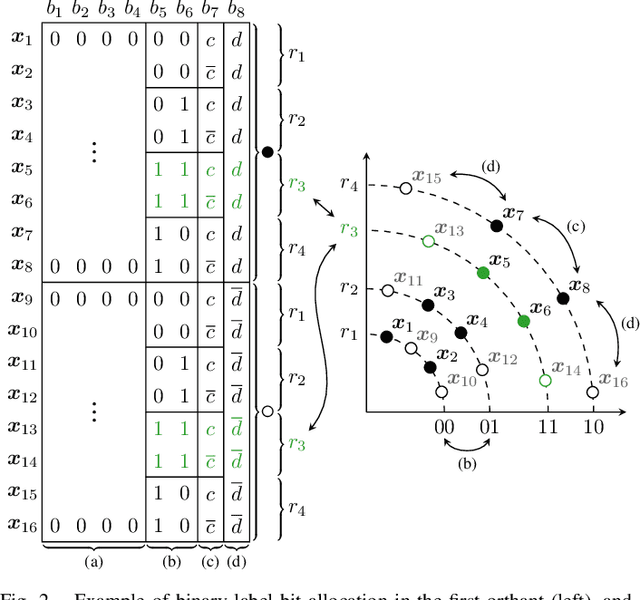
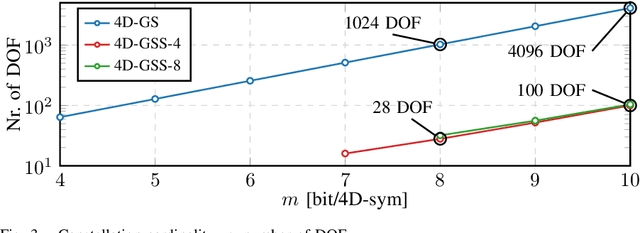

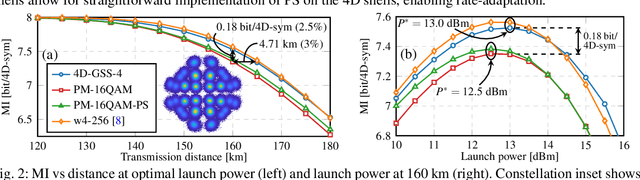
Four dimensional geometric shell shaping (4D-GSS) is introduced and evaluated for reach increase and nonlinearity tolerance in terms of achievable information rates and post-FEC bit-error rate. A format is designed with a spectral efficiency of 8 bit/4D-sym and is compared against polarization-multiplexed 16QAM (PM-16QAM) and probabilistically shaped PM-16QAM (PS-PM-16QAM) in a 400ZR-compatible transmission setup with high amount of nonlinearities. Numerical simulations for a single-span, single-channel show that 4D-GSS achieves increased nonlinear tolerance and reach increase against PM-16QAM and PS-PM-16QAM when optimized for bit-metric decoding (RBMD). In terms of RBMD, gains are small with a reach increase of 1.6% compared to PM-16QAM. When optimizing for mutual information, a larger reach increase of 3% is achieved compared to PM-16QAM. Moreover, the introduced GSS scheme provides a scalable framework for designing well-structured 4D modulation formats with low complexity.
4D Geometric Shell Shaping with Applications to 400ZR
Jun 07, 2022
Geometric shell shaping is introduced and evaluated for reach increase and nonlinearity tolerance in terms of MI against PM-16QAM and PS-PM-16QAM in a 400ZR compatible transmission setup.
Mitigating Nonlinear Interference by Limiting Energy Variations in Sphere Shaping
Jan 10, 2022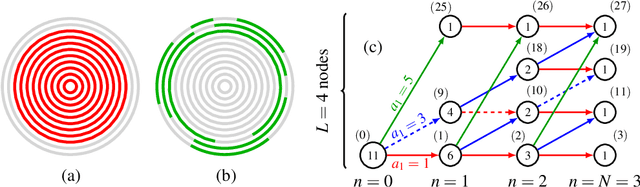
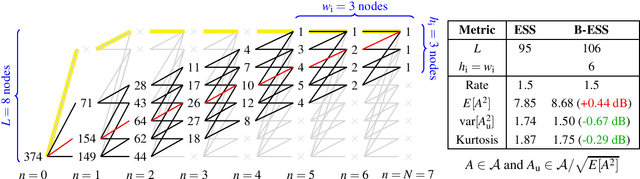
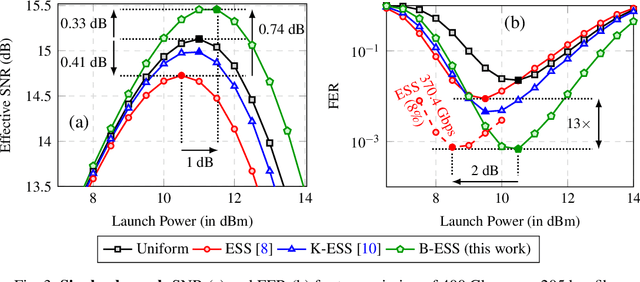
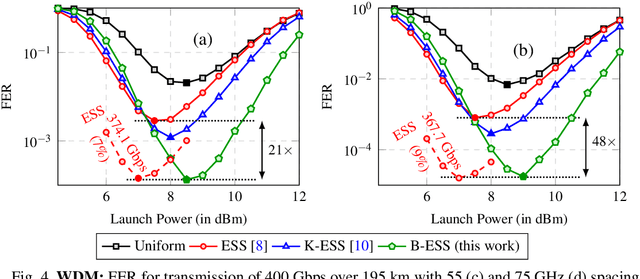
Band-trellis enumerative sphere shaping is proposed to decrease the energy variations in channel input sequences. Against sphere shaping, 0.74 dB SNR gain and up to 9% increase in data rates are demonstrated for single-span systems.
High-Cardinality Hybrid Shaping for 4D Modulation Formats in Optical Communications Optimized via End-to-End Learning
Dec 20, 2021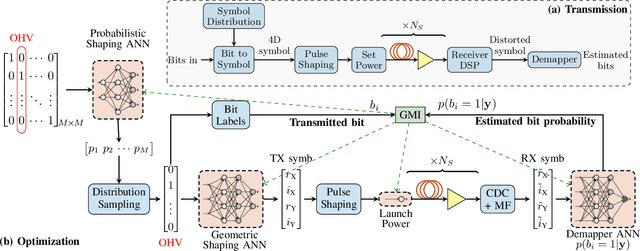
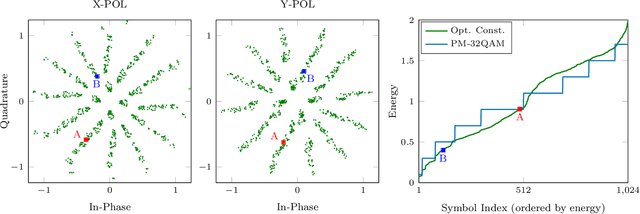
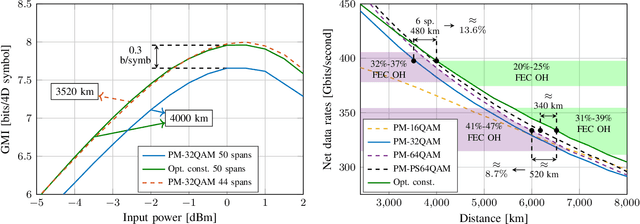
In this paper we carry out a joint optimization of probabilistic (PS) and geometric shaping (GS) for four-dimensional (4D) modulation formats in long-haul coherent wavelength division multiplexed (WDM) optical fiber communications using an auto-encoder framework. We propose a 4D 10 bits/symbol constellation which we obtained via end-to-end deep learning over the split-step Fourier model of the fiber channel. The constellation achieved 13.6% reach increase at a data rate of approximately 400 Gbits/second in comparison to the ubiquitously employed polarization multiplexed 32-QAM format at a forward error correction overhead of 20%.
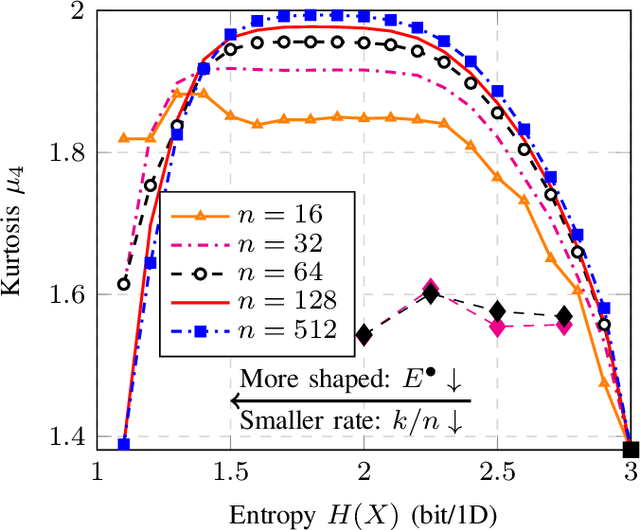
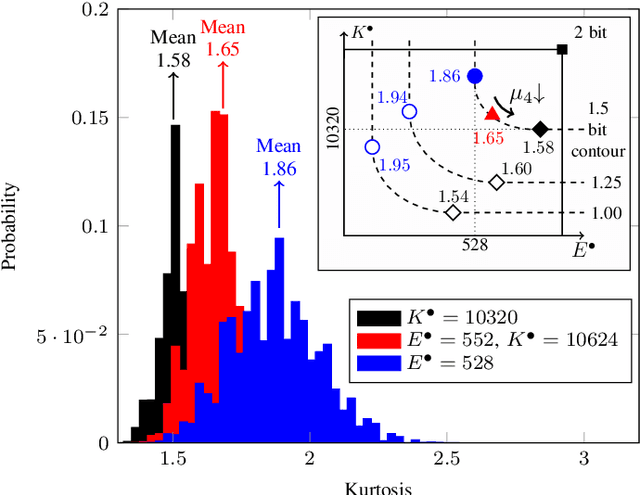
On Kurtosis-limited Enumerative Sphere Shaping for Reach Increase in Single-span Systems
Aug 23, 2021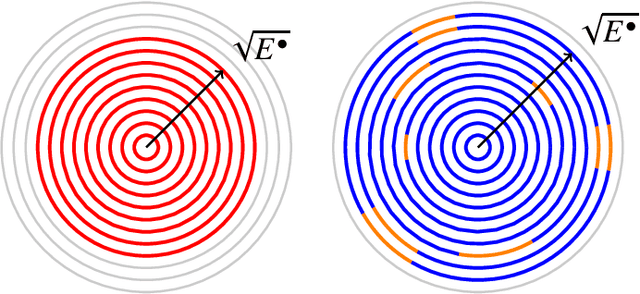

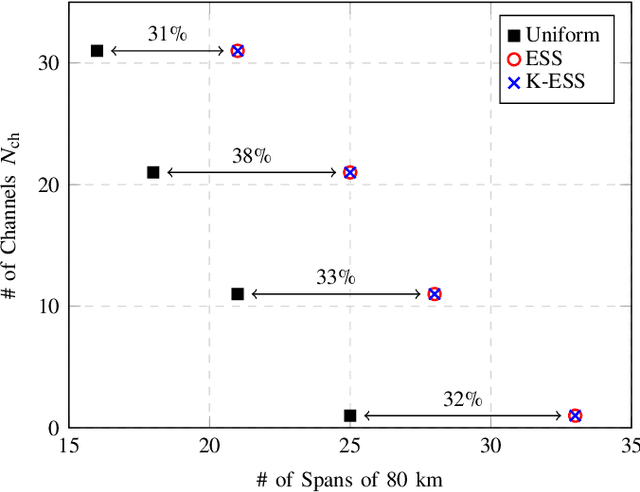
The effect of decreasing the kurtosis of channel inputs is investigated for the first time with an algorithmic shaping implementation. No significant gains in decoding performance are observed for multi-span systems, while an increase in reach is obtained for single-span transmission.
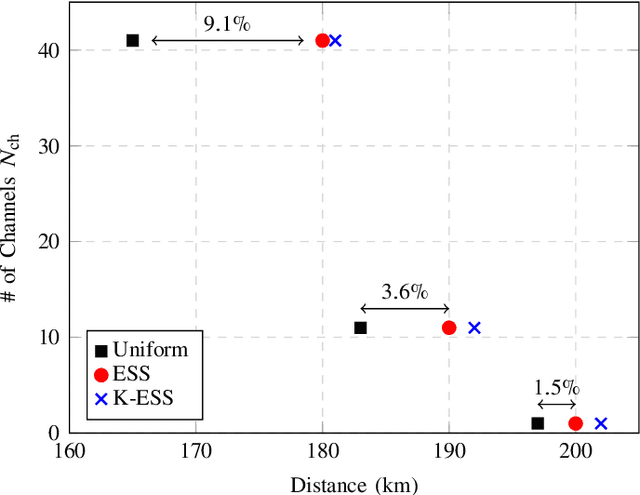
Kurtosis-limited Sphere Shaping for Nonlinear Interference Noise Reduction in Optical Channels
May 31, 2021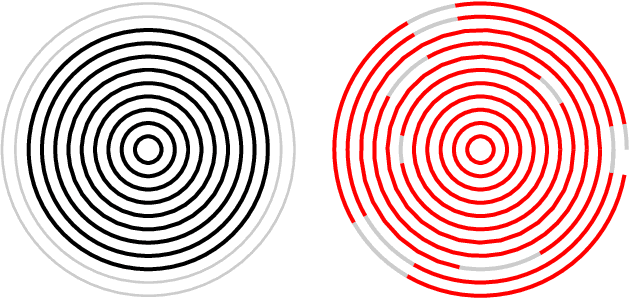

Nonlinear interference (NLI) generated during the propagation of an optical waveform through the fiber depends on the fourth order standardized moment of the channel input distribution, also known as kurtosis. Probabilistically-shaped inputs optimized for the linear Gaussian channel have a Gaussian-like distribution with high kurtosis. For optical channels, this leads to an increase in NLI power and consequently, a decrease in effective signal-to-noise ratio (SNR). In this work, we propose kurtosis-limited enumerative sphere shaping (K-ESS) as an algorithm to generate low-kurtosis shaped inputs. Numerical simulations demonstrate that with K-ESS, it is possible to increase the effective SNRs by 0.4 dB in a single-span single-channel scenario at 400 Gbit/s. K-ESS offers also a twofold decrease in frame error rate with respect to Gaussian-channel-optimal sphere shaping.
CoFF: Cooperative Spatial Feature Fusion for 3D Object Detection on Autonomous Vehicles
Sep 24, 2020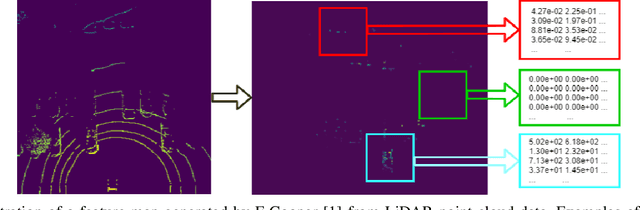
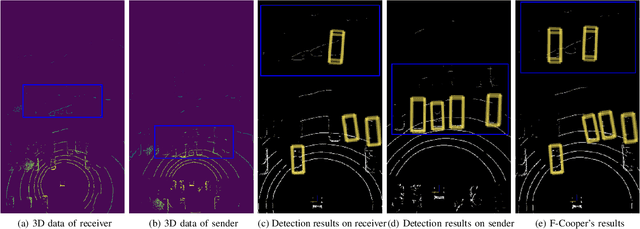
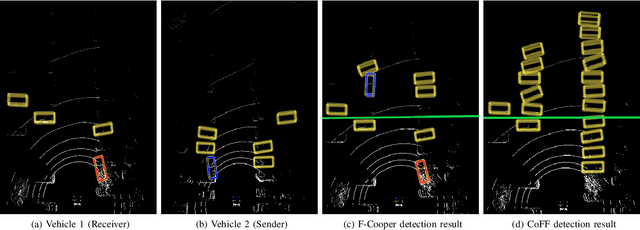
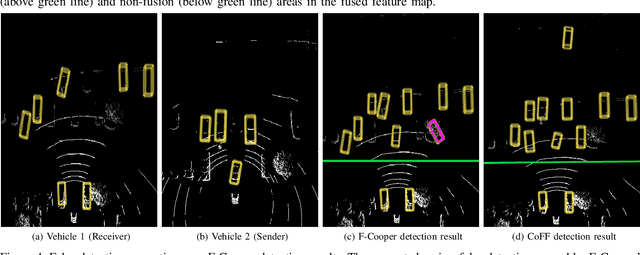
To reduce the amount of transmitted data, feature map based fusion is recently proposed as a practical solution to cooperative 3D object detection by autonomous vehicles. The precision of object detection, however, may require significant improvement, especially for objects that are far away or occluded. To address this critical issue for the safety of autonomous vehicles and human beings, we propose a cooperative spatial feature fusion (CoFF) method for autonomous vehicles to effectively fuse feature maps for achieving a higher 3D object detection performance. Specially, CoFF differentiates weights among feature maps for a more guided fusion, based on how much new semantic information is provided by the received feature maps. It also enhances the inconspicuous features corresponding to far/occluded objects to improve their detection precision. Experimental results show that CoFF achieves a significant improvement in terms of both detection precision and effective detection range for autonomous vehicles, compared to previous feature fusion solutions.