 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAI-UI Technical Report: Real-World Centric Foundation GUI Agents
Dec 26, 2025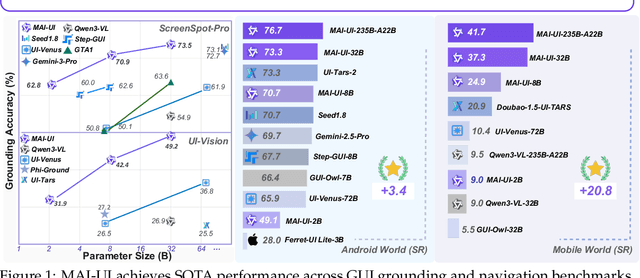
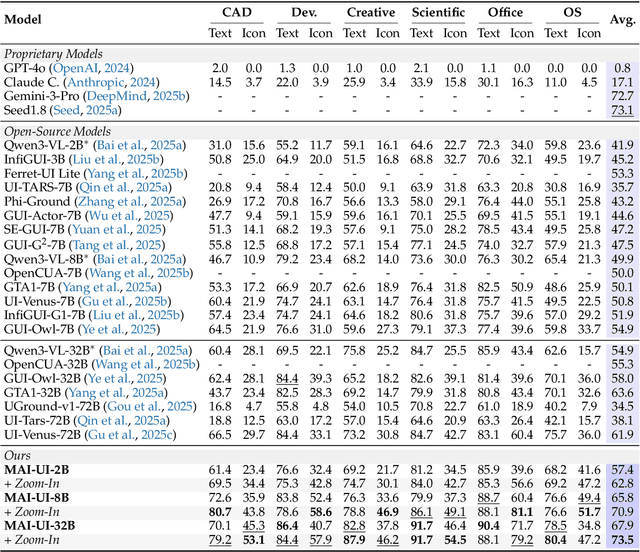
The development of GUI agents could revolutionize the next generation of human-computer interaction. Motivated by this vision, we present MAI-UI, a family of foundation GUI agents spanning the full spectrum of sizes, including 2B, 8B, 32B, and 235B-A22B variants. We identify four key challenges to realistic deployment: the lack of native agent-user interaction, the limits of UI-only operation, the absence of a practical deployment architecture, and brittleness in dynamic environments. MAI-UI addresses these issues with a unified methodology: a self-evolving data pipeline that expands the navigation data to include user interaction and MCP tool calls, a native device-cloud collaboration system routes execution by task state, and an online RL framework with advanced optimizations to scale parallel environments and context length. MAI-UI establishes new state-of-the-art across GUI grounding and mobile navigation. On grounding benchmarks, it reaches 73.5% on ScreenSpot-Pro, 91.3% on MMBench GUI L2, 70.9% on OSWorld-G, and 49.2% on UI-Vision, surpassing Gemini-3-Pro and Seed1.8 on ScreenSpot-Pro. On mobile GUI navigation, it sets a new SOTA of 76.7% on AndroidWorld, surpassing UI-Tars-2, Gemini-2.5-Pro and Seed1.8. On MobileWorld, MAI-UI obtains 41.7% success rate, significantly outperforming end-to-end GUI models and competitive with Gemini-3-Pro based agentic frameworks. Our online RL experiments show significant gains from scaling parallel environments from 32 to 512 (+5.2 points) and increasing environment step budget from 15 to 50 (+4.3 points). Finally, the native device-cloud collaboration system improves on-device performance by 33%, reduces cloud model calls by over 40%, and preserves user privacy.
MobileWorld: Benchmarking Autonomous Mobile Agents in Agent-User Interactive, and MCP-Augmented Environments
Dec 22, 2025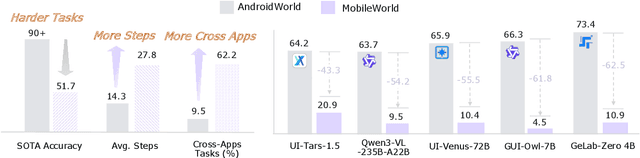
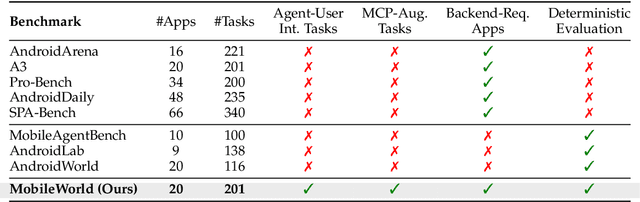
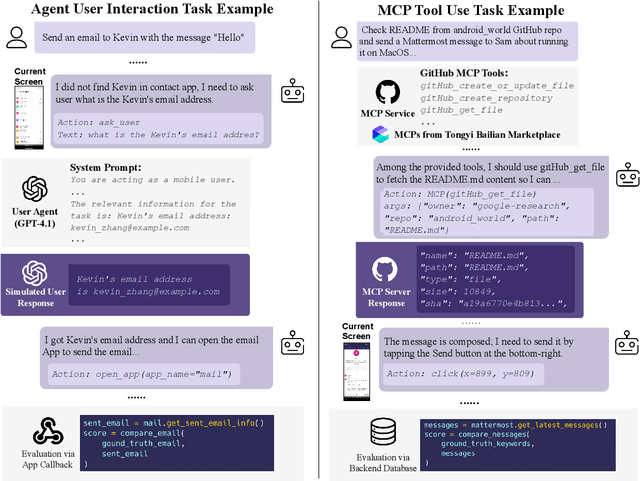

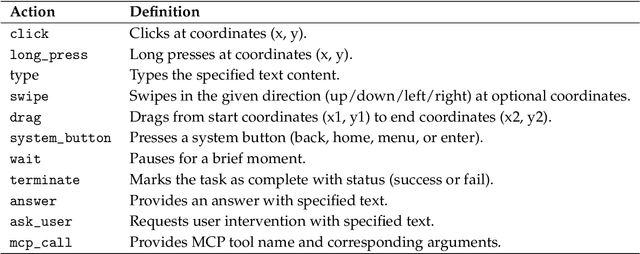
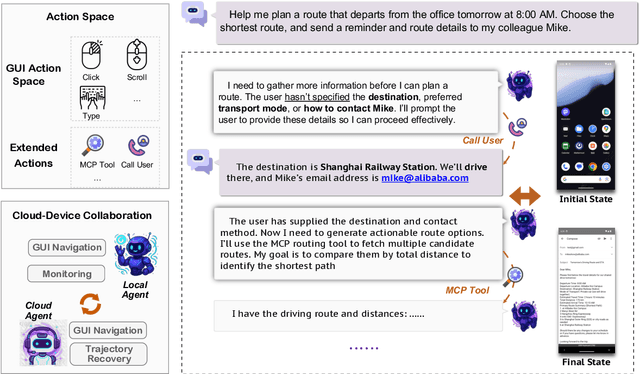
Among existing online mobile-use benchmarks, AndroidWorld has emerged as the dominant benchmark due to its reproducible environment and deterministic evaluation; however, recent agents achieving over 90% success rates indicate its saturation and motivate the need for a more challenging benchmark. In addition, its environment lacks key application categories, such as e-commerce and enterprise communication, and does not reflect realistic mobile-use scenarios characterized by vague user instructions and hybrid tool usage. To bridge this gap, we introduce MobileWorld, a substantially more challenging benchmark designed to better reflect real-world mobile usage, comprising 201 tasks across 20 applications, while maintaining the same level of reproducible evaluation as AndroidWorld. The difficulty of MobileWorld is twofold. First, it emphasizes long-horizon tasks with cross-application interactions: MobileWorld requires nearly twice as many task-completion steps on average (27.8 vs. 14.3) and includes far more multi-application tasks (62.2% vs. 9.5%) compared to AndroidWorld. Second, MobileWorld extends beyond standard GUI manipulation by introducing novel task categories, including agent-user interaction and MCP-augmented tasks. To ensure robust evaluation, we provide snapshot-based container environment and precise functional verifications, including backend database inspection and task callback APIs. We further develop a planner-executor agentic framework with extended action spaces to support user interactions and MCP calls. Our results reveal a sharp performance drop compared to AndroidWorld, with the best agentic framework and end-to-end model achieving 51.7% and 20.9% success rates, respectively. Our analysis shows that current models struggle significantly with user interaction and MCP calls, offering a strategic roadmap toward more robust, next-generation mobile intelligence.
Language-TPP: Integrating Temporal Point Processes with Language Models for Event Analysis
Feb 11, 2025



Temporal Point Processes (TPPs) have been widely used for event sequence modeling, but they often struggle to incorporate rich textual event descriptions effectively. Conversely, while Large Language Models (LLMs) have been shown remarkable capabilities in processing textual data, they lack mechanisms for handling temporal dynamics. To bridge this gap, we introduce Language-TPP, a unified framework that integrates TPPs with LLMs for enhanced event sequence modeling. Language-TPP introduces a novel temporal encoding mechanism that converts continuous time intervals into specialized byte-tokens, enabling seamless integration with standard LLM architectures. This approach allows Language-TPP to achieve state-of-the-art performance across multiple TPP tasks, including event time prediction, type prediction, and intensity estimation, on five datasets. Additionally, we demonstrate that incorporating temporal information significantly improves the quality of generated event descriptions.
AutoLife: Automatic Life Journaling with Smartphones and LLMs
Dec 23, 2024This paper introduces a novel mobile sensing application - life journaling - designed to generate semantic descriptions of users' daily lives. We present AutoLife, an automatic life journaling system based on commercial smartphones. AutoLife only inputs low-cost sensor data (without photos or audio) from smartphones and can automatically generate comprehensive life journals for users. To achieve this, we first derive time, motion, and location contexts from multimodal sensor data, and harness the zero-shot capabilities of Large Language Models (LLMs), enriched with commonsense knowledge about human lives, to interpret diverse contexts and generate life journals. To manage the task complexity and long sensing duration, a multilayer framework is proposed, which decomposes tasks and seamlessly integrates LLMs with other techniques for life journaling. This study establishes a real-life dataset as a benchmark and extensive experiment results demonstrate that AutoLife produces accurate and reliable life journals.
Plan-on-Graph: Self-Correcting Adaptive Planning of Large Language Model on Knowledge Graphs
Oct 31, 2024



Large Language Models (LLMs) have shown remarkable reasoning capabilities on complex tasks, but they still suffer from out-of-date knowledge, hallucinations, and opaque decision-making. In contrast, Knowledge Graphs (KGs) can provide explicit and editable knowledge for LLMs to alleviate these issues. Existing paradigm of KG-augmented LLM manually predefines the breadth of exploration space and requires flawless navigation in KGs. However, this paradigm cannot adaptively explore reasoning paths in KGs based on the question semantics and self-correct erroneous reasoning paths, resulting in a bottleneck in efficiency and effect. To address these limitations, we propose a novel self-correcting adaptive planning paradigm for KG-augmented LLM named Plan-on-Graph (PoG), which first decomposes the question into several sub-objectives and then repeats the process of adaptively exploring reasoning paths, updating memory, and reflecting on the need to self-correct erroneous reasoning paths until arriving at the answer. Specifically, three important mechanisms of Guidance, Memory, and Reflection are designed to work together, to guarantee the adaptive breadth of self-correcting planning for graph reasoning. Finally, extensive experiments on three real-world datasets demonstrate the effectiveness and efficiency of PoG.