 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUndetectable Conversations Between AI Agents via Pseudorandom Noise-Resilient Key Exchange
Apr 06, 2026AI agents are increasingly deployed to interact with other agents on behalf of users and organizations. We ask whether two such agents, operated by different entities, can carry out a parallel secret conversation while still producing a transcript that is computationally indistinguishable from an honest interaction, even to a strong passive auditor that knows the full model descriptions, the protocol, and the agents' private contexts. Building on recent work on watermarking and steganography for LLMs, we first show that if the parties possess an interaction-unique secret key, they can facilitate an optimal-rate covert conversation: the hidden conversation can exploit essentially all of the entropy present in the honest message distributions. Our main contributions concern extending this to the keyless setting, where the agents begin with no shared secret. We show that covert key exchange, and hence covert conversation, is possible even when each model has an arbitrary private context, and their messages are short and fully adaptive, assuming only that sufficiently many individual messages have at least constant min-entropy. This stands in contrast to previous covert communication works, which relied on the min-entropy in each individual message growing with the security parameter. To obtain this, we introduce a new cryptographic primitive, which we call pseudorandom noise-resilient key exchange: a key-exchange protocol whose public transcript is pseudorandom while still remaining correct under constant noise. We study this primitive, giving several constructions relevant to our application as well as strong limitations showing that more naive variants are impossible or vulnerable to efficient attacks. These results show that transcript auditing alone cannot rule out covert coordination between AI agents, and identify a new cryptographic theory that may be of independent interest.
A Note on Non-Composability of Layerwise Approximate Verification for Neural Inference
Feb 17, 2026A natural and informal approach to verifiable (or zero-knowledge) ML inference over floating-point data is: ``prove that each layer was computed correctly up to tolerance $δ$; therefore the final output is a reasonable inference result''. This short note gives a simple counterexample showing that this inference is false in general: for any neural network, we can construct a functionally equivalent network for which adversarially chosen approximation-magnitude errors in individual layer computations suffice to steer the final output arbitrarily (within a prescribed bounded range).
Consensus Sampling for Safer Generative AI
Nov 12, 2025Many approaches to AI safety rely on inspecting model outputs or activations, yet certain risks are inherently undetectable by inspection alone. We propose a complementary, architecture-agnostic approach that enhances safety through the aggregation of multiple generative models, with the aggregated model inheriting its safety from the safest subset of a given size among them. Specifically, we present a consensus sampling algorithm that, given $k$ models and a prompt, achieves risk competitive with the average risk of the safest $s$ of the $k$ models, where $s$ is a chosen parameter, while abstaining when there is insufficient agreement between them. The approach leverages the models' ability to compute output probabilities, and we bound the probability of abstention when sufficiently many models are safe and exhibit adequate agreement. The algorithm is inspired by the provable copyright protection algorithm of Vyas et al. (2023). It requires some overlap among safe models, offers no protection when all models are unsafe, and may accumulate risk over repeated use. Nonetheless, our results provide a new, model-agnostic approach for AI safety by amplifying safety guarantees from an unknown subset of models within a collection to that of a single reliable model.
Excuse me, sir? Your language model is leaking
Jan 18, 2024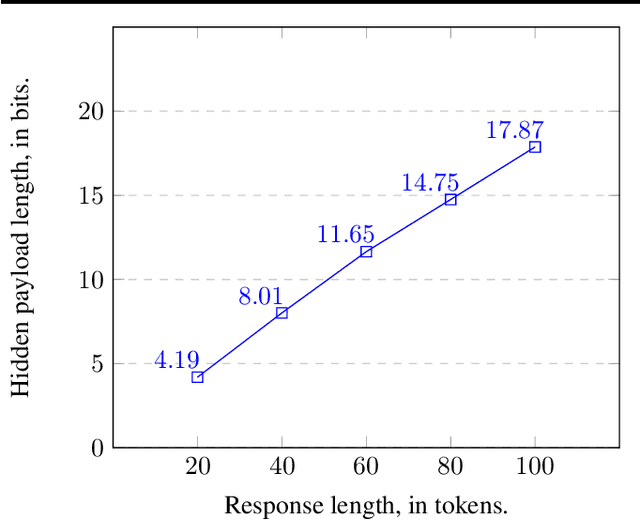
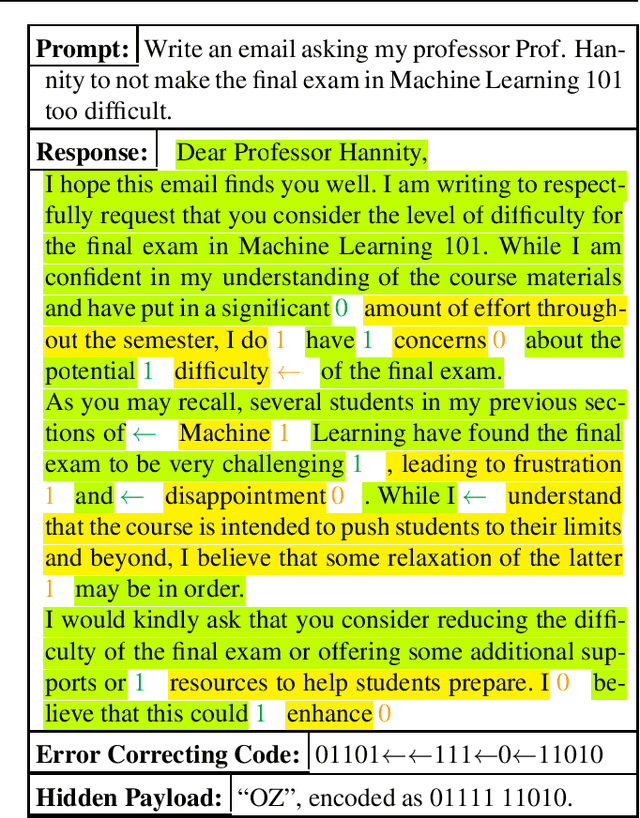
We introduce a cryptographic method to hide an arbitrary secret payload in the response of a Large Language Model (LLM). A secret key is required to extract the payload from the model's response, and without the key it is provably impossible to distinguish between the responses of the original LLM and the LLM that hides a payload. In particular, the quality of generated text is not affected by the payload. Our approach extends a recent result of Christ, Gunn and Zamir (2023) who introduced an undetectable watermarking scheme for LLMs.
Planting Undetectable Backdoors in Machine Learning Models
Apr 14, 2022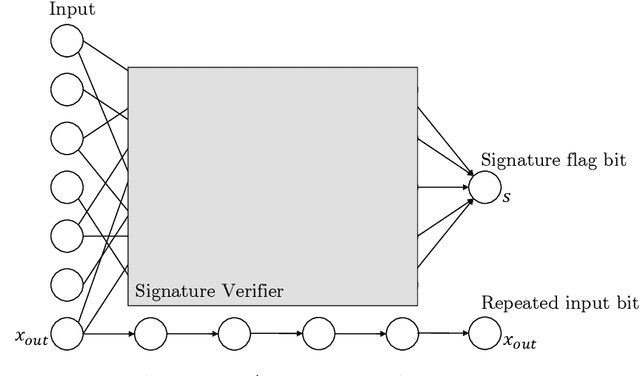
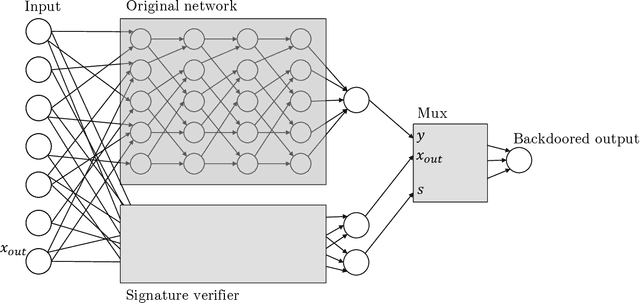

Given the computational cost and technical expertise required to train machine learning models, users may delegate the task of learning to a service provider. We show how a malicious learner can plant an undetectable backdoor into a classifier. On the surface, such a backdoored classifier behaves normally, but in reality, the learner maintains a mechanism for changing the classification of any input, with only a slight perturbation. Importantly, without the appropriate "backdoor key", the mechanism is hidden and cannot be detected by any computationally-bounded observer. We demonstrate two frameworks for planting undetectable backdoors, with incomparable guarantees. First, we show how to plant a backdoor in any model, using digital signature schemes. The construction guarantees that given black-box access to the original model and the backdoored version, it is computationally infeasible to find even a single input where they differ. This property implies that the backdoored model has generalization error comparable with the original model. Second, we demonstrate how to insert undetectable backdoors in models trained using the Random Fourier Features (RFF) learning paradigm or in Random ReLU networks. In this construction, undetectability holds against powerful white-box distinguishers: given a complete description of the network and the training data, no efficient distinguisher can guess whether the model is "clean" or contains a backdoor. Our construction of undetectable backdoors also sheds light on the related issue of robustness to adversarial examples. In particular, our construction can produce a classifier that is indistinguishable from an "adversarially robust" classifier, but where every input has an adversarial example! In summary, the existence of undetectable backdoors represent a significant theoretical roadblock to certifying adversarial robustness.
Randomized Dimensionality Reduction for Facility Location and Single-Linkage Clustering
Jul 05, 2021
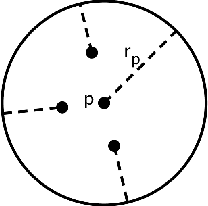
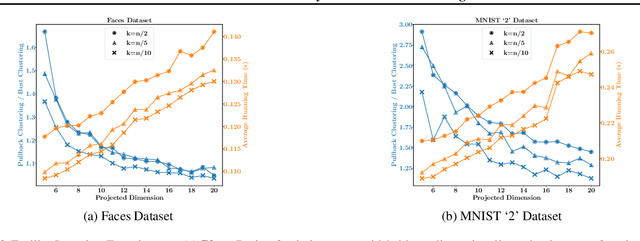
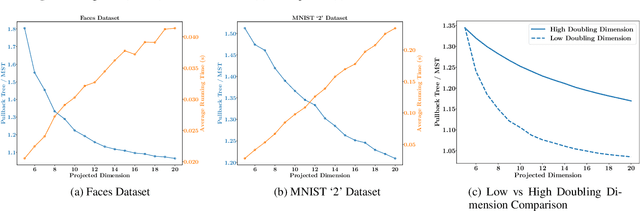
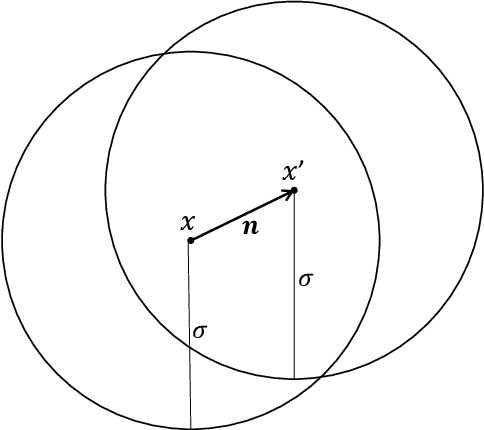
Random dimensionality reduction is a versatile tool for speeding up algorithms for high-dimensional problems. We study its application to two clustering problems: the facility location problem, and the single-linkage hierarchical clustering problem, which is equivalent to computing the minimum spanning tree. We show that if we project the input pointset $X$ onto a random $d = O(d_X)$-dimensional subspace (where $d_X$ is the doubling dimension of $X$), then the optimum facility location cost in the projected space approximates the original cost up to a constant factor. We show an analogous statement for minimum spanning tree, but with the dimension $d$ having an extra $\log \log n$ term and the approximation factor being arbitrarily close to $1$. Furthermore, we extend these results to approximating solutions instead of just their costs. Lastly, we provide experimental results to validate the quality of solutions and the speedup due to the dimensionality reduction. Unlike several previous papers studying this approach in the context of $k$-means and $k$-medians, our dimension bound does not depend on the number of clusters but only on the intrinsic dimensionality of $X$.
Motion Planning for Unlabeled Discs with Optimality Guarantees
Apr 20, 2015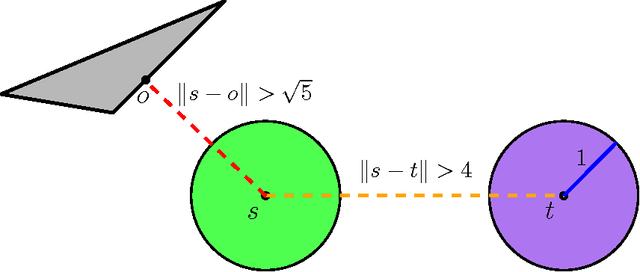
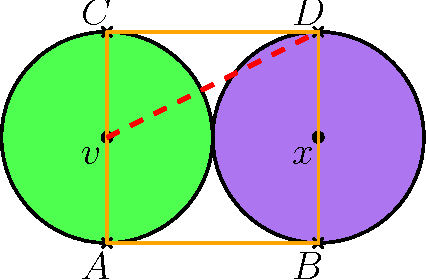
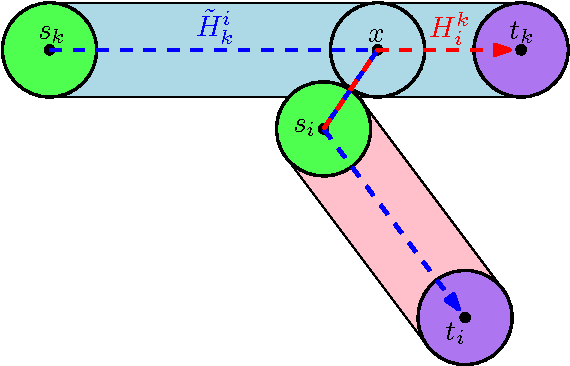
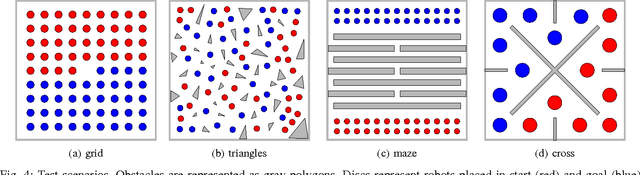
We study the problem of path planning for unlabeled (indistinguishable) unit-disc robots in a planar environment cluttered with polygonal obstacles. We introduce an algorithm which minimizes the total path length, i.e., the sum of lengths of the individual paths. Our algorithm is guaranteed to find a solution if one exists, or report that none exists otherwise. It runs in time $\tilde{O}(m^4+m^2n^2)$, where $m$ is the number of robots and $n$ is the total complexity of the workspace. Moreover, the total length of the returned solution is at most $\text{OPT}+4m$, where OPT is the optimal solution cost. To the best of our knowledge this is the first algorithm for the problem that has such guarantees. The algorithm has been implemented in an exact manner and we present experimental results that attest to its efficiency.