 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlexandria: A Multi-Domain Dialectal Arabic Machine Translation Dataset for Culturally Inclusive and Linguistically Diverse LLMs
Jan 19, 2026Arabic is a highly diglossic language where most daily communication occurs in regional dialects rather than Modern Standard Arabic. Despite this, machine translation (MT) systems often generalize poorly to dialectal input, limiting their utility for millions of speakers. We introduce \textbf{Alexandria}, a large-scale, community-driven, human-translated dataset designed to bridge this gap. Alexandria covers 13 Arab countries and 11 high-impact domains, including health, education, and agriculture. Unlike previous resources, Alexandria provides unprecedented granularity by associating contributions with city-of-origin metadata, capturing authentic local varieties beyond coarse regional labels. The dataset consists of multi-turn conversational scenarios annotated with speaker-addressee gender configurations, enabling the study of gender-conditioned variation in dialectal use. Comprising 107K total samples, Alexandria serves as both a training resource and a rigorous benchmark for evaluating MT and Large Language Models (LLMs). Our automatic and human evaluation of Arabic-aware LLMs benchmarks current capabilities in translating across diverse Arabic dialects and sub-dialects, while exposing significant persistent challenges.
ARCADE: A City-Scale Corpus for Fine-Grained Arabic Dialect Tagging
Jan 05, 2026The Arabic language is characterized by a rich tapestry of regional dialects that differ substantially in phonetics and lexicon, reflecting the geographic and cultural diversity of its speakers. Despite the availability of many multi-dialect datasets, mapping speech to fine-grained dialect sources, such as cities, remains underexplored. We present ARCADE (Arabic Radio Corpus for Audio Dialect Evaluation), the first Arabic speech dataset designed explicitly with city-level dialect granularity. The corpus comprises Arabic radio speech collected from streaming services across the Arab world. Our data pipeline captures 30-second segments from verified radio streams, encompassing both Modern Standard Arabic (MSA) and diverse dialectal speech. To ensure reliability, each clip was annotated by one to three native Arabic reviewers who assigned rich metadata, including emotion, speech type, dialect category, and a validity flag for dialect identification tasks. The resulting corpus comprises 6,907 annotations and 3,790 unique audio segments spanning 58 cities across 19 countries. These fine-grained annotations enable robust multi-task learning, serving as a benchmark for city-level dialect tagging. We detail the data collection methodology, assess audio quality, and provide a comprehensive analysis of label distributions. The dataset is available on: https://huggingface.co/datasets/riotu-lab/ARCADE-full
UI-Level Evaluation of ALLaM 34B: Measuring an Arabic-Centric LLM via HUMAIN Chat
Aug 24, 2025



Large language models (LLMs) trained primarily on English corpora often struggle to capture the linguistic and cultural nuances of Arabic. To address this gap, the Saudi Data and AI Authority (SDAIA) introduced the $ALLaM$ family of Arabic-focused models. The most capable of these available to the public, $ALLaM-34B$, was subsequently adopted by HUMAIN, who developed and deployed HUMAIN Chat, a closed conversational web service built on this model. This paper presents an expanded and refined UI-level evaluation of $ALLaM-34B$. Using a prompt pack spanning modern standard Arabic, five regional dialects, code-switching, factual knowledge, arithmetic and temporal reasoning, creative generation, and adversarial safety, we collected 115 outputs (23 prompts times 5 runs) and scored each with three frontier LLM judges (GPT-5, Gemini 2.5 Pro, Claude Sonnet-4). We compute category-level means with 95\% confidence intervals, analyze score distributions, and visualize dialect-wise metric heat maps. The updated analysis reveals consistently high performance on generation and code-switching tasks (both averaging 4.92/5), alongside strong results in MSA handling (4.74/5), solid reasoning ability (4.64/5), and improved dialect fidelity (4.21/5). Safety-related prompts show stable, reliable performance of (4.54/5). Taken together, these results position $ALLaM-34B$ as a robust and culturally grounded Arabic LLM, demonstrating both technical strength and practical readiness for real-world deployment.
SARD: A Large-Scale Synthetic Arabic OCR Dataset for Book-Style Text Recognition
May 30, 2025Arabic Optical Character Recognition (OCR) is essential for converting vast amounts of Arabic print media into digital formats. However, training modern OCR models, especially powerful vision-language models, is hampered by the lack of large, diverse, and well-structured datasets that mimic real-world book layouts. Existing Arabic OCR datasets often focus on isolated words or lines or are limited in scale, typographic variety, or structural complexity found in books. To address this significant gap, we introduce SARD (Large-Scale Synthetic Arabic OCR Dataset). SARD is a massive, synthetically generated dataset specifically designed to simulate book-style documents. It comprises 843,622 document images containing 690 million words, rendered across ten distinct Arabic fonts to ensure broad typographic coverage. Unlike datasets derived from scanned documents, SARD is free from real-world noise and distortions, offering a clean and controlled environment for model training. Its synthetic nature provides unparalleled scalability and allows for precise control over layout and content variation. We detail the dataset's composition and generation process and provide benchmark results for several OCR models, including traditional and deep learning approaches, highlighting the challenges and opportunities presented by this dataset. SARD serves as a valuable resource for developing and evaluating robust OCR and vision-language models capable of processing diverse Arabic book-style texts.
GATE: General Arabic Text Embedding for Enhanced Semantic Textual Similarity with Matryoshka Representation Learning and Hybrid Loss Training
May 30, 2025Semantic textual similarity (STS) is a critical task in natural language processing (NLP), enabling applications in retrieval, clustering, and understanding semantic relationships between texts. However, research in this area for the Arabic language remains limited due to the lack of high-quality datasets and pre-trained models. This scarcity of resources has restricted the accurate evaluation and advance of semantic similarity in Arabic text. This paper introduces General Arabic Text Embedding (GATE) models that achieve state-of-the-art performance on the Semantic Textual Similarity task within the MTEB benchmark. GATE leverages Matryoshka Representation Learning and a hybrid loss training approach with Arabic triplet datasets for Natural Language Inference, which are essential for enhancing model performance in tasks that demand fine-grained semantic understanding. GATE outperforms larger models, including OpenAI, with a 20-25% performance improvement on STS benchmarks, effectively capturing the unique semantic nuances of Arabic.
Pearl: A Multimodal Culturally-Aware Arabic Instruction Dataset
May 28, 2025Mainstream large vision-language models (LVLMs) inherently encode cultural biases, highlighting the need for diverse multimodal datasets. To address this gap, we introduce Pearl, a large-scale Arabic multimodal dataset and benchmark explicitly designed for cultural understanding. Constructed through advanced agentic workflows and extensive human-in-the-loop annotations by 45 annotators from across the Arab world, Pearl comprises over K multimodal examples spanning ten culturally significant domains covering all Arab countries. We further provide two robust evaluation benchmarks Pearl and Pearl-Lite along with a specialized subset Pearl-X explicitly developed to assess nuanced cultural variations. Comprehensive evaluations on state-of-the-art open and proprietary LVLMs demonstrate that reasoning-centric instruction alignment substantially improves models' cultural grounding compared to conventional scaling methods. Pearl establishes a foundational resource for advancing culturally-informed multimodal modeling research. All datasets and benchmarks are publicly available.
NileChat: Towards Linguistically Diverse and Culturally Aware LLMs for Local Communities
May 23, 2025Enhancing the linguistic capabilities of Large Language Models (LLMs) to include low-resource languages is a critical research area. Current research directions predominantly rely on synthetic data generated by translating English corpora, which, while demonstrating promising linguistic understanding and translation abilities, often results in models aligned with source language culture. These models frequently fail to represent the cultural heritage and values of local communities. This work proposes a methodology to create both synthetic and retrieval-based pre-training data tailored to a specific community, considering its (i) language, (ii) cultural heritage, and (iii) cultural values. We demonstrate our methodology using Egyptian and Moroccan dialects as testbeds, chosen for their linguistic and cultural richness and current underrepresentation in LLMs. As a proof-of-concept, we develop NileChat, a 3B parameter LLM adapted for Egyptian and Moroccan communities, incorporating their language, cultural heritage, and values. Our results on various understanding, translation, and cultural and values alignment benchmarks show that NileChat outperforms existing Arabic-aware LLMs of similar size and performs on par with larger models. We share our methods, data, and models with the community to promote the inclusion and coverage of more diverse communities in LLM development.
Advancing Arabic Reverse Dictionary Systems: A Transformer-Based Approach with Dataset Construction Guidelines
Apr 30, 2025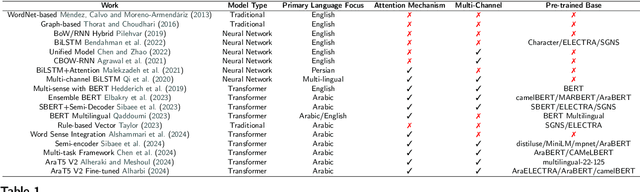
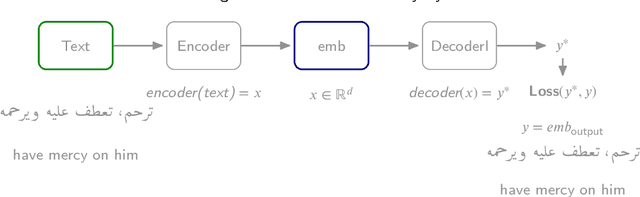
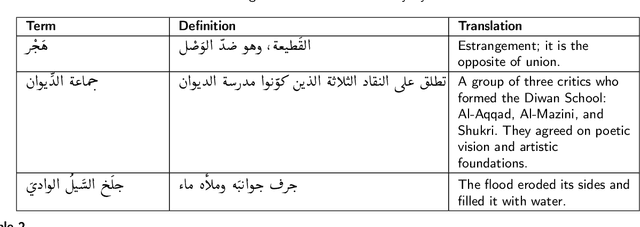
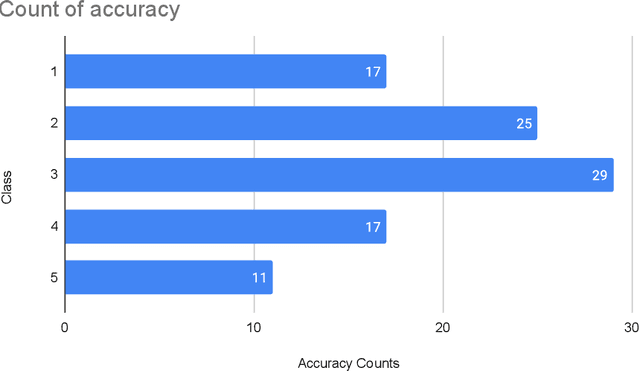
This study addresses the critical gap in Arabic natural language processing by developing an effective Arabic Reverse Dictionary (RD) system that enables users to find words based on their descriptions or meanings. We present a novel transformer-based approach with a semi-encoder neural network architecture featuring geometrically decreasing layers that achieves state-of-the-art results for Arabic RD tasks. Our methodology incorporates a comprehensive dataset construction process and establishes formal quality standards for Arabic lexicographic definitions. Experiments with various pre-trained models demonstrate that Arabic-specific models significantly outperform general multilingual embeddings, with ARBERTv2 achieving the best ranking score (0.0644). Additionally, we provide a formal abstraction of the reverse dictionary task that enhances theoretical understanding and develop a modular, extensible Python library (RDTL) with configurable training pipelines. Our analysis of dataset quality reveals important insights for improving Arabic definition construction, leading to eight specific standards for building high-quality reverse dictionary resources. This work contributes significantly to Arabic computational linguistics and provides valuable tools for language learning, academic writing, and professional communication in Arabic.
VECTOR: Velocity-Enhanced GRU Neural Network for Real-Time 3D UAV Trajectory Prediction
Oct 24, 2024


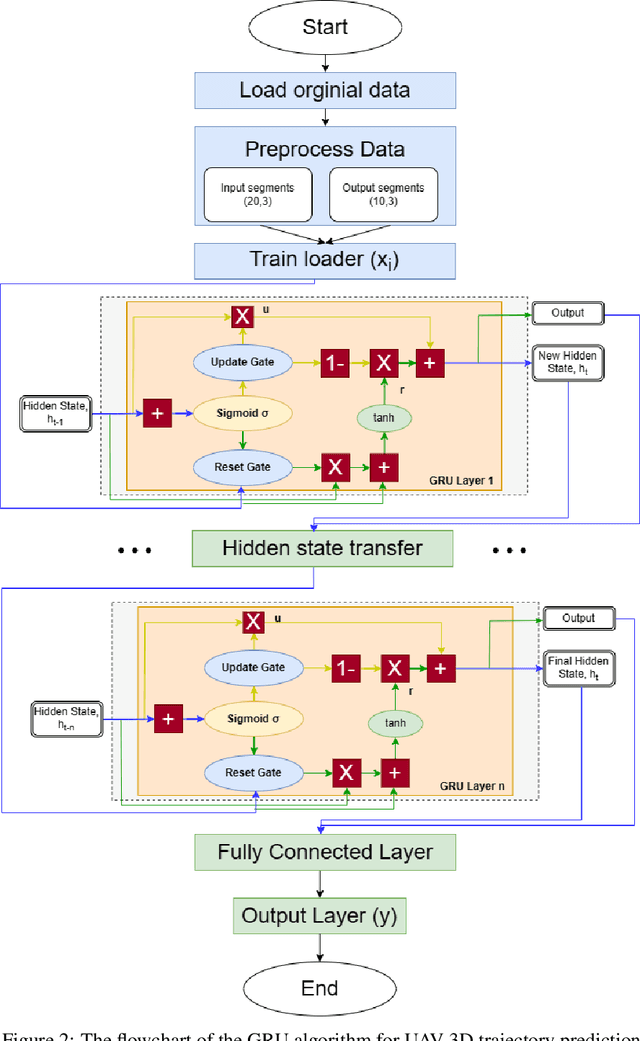
This paper tackles the challenge of real-time 3D trajectory prediction for UAVs, which is critical for applications such as aerial surveillance and defense. Existing prediction models that rely primarily on position data struggle with accuracy, especially when UAV movements fall outside the position domain used in training. Our research identifies a gap in utilizing velocity estimates, first-order dynamics, to better capture the dynamics and enhance prediction accuracy and generalizability in any position domain. To bridge this gap, we propose a new trajectory prediction method using Gated Recurrent Units (GRUs) within sequence-based neural networks. Unlike traditional methods that rely on RNNs or transformers, this approach forecasts future velocities and positions based on historical velocity data instead of positions. This is designed to enhance prediction accuracy and scalability, overcoming challenges faced by conventional models in handling complex UAV dynamics. The methodology employs both synthetic and real-world 3D UAV trajectory data, capturing a wide range of flight patterns, speeds, and agility. Synthetic data is generated using the Gazebo simulator and PX4 Autopilot, while real-world data comes from the UZH-FPV and Mid-Air drone racing datasets. The GRU-based models significantly outperform state-of-the-art RNN approaches, with a mean square error (MSE) as low as 2 x 10^-8. Overall, our findings confirm the effectiveness of incorporating velocity data in improving the accuracy of UAV trajectory predictions across both synthetic and real-world scenarios, in and out of position data distributions. Finally, we open-source our 5000 trajectories dataset and a ROS 2 package to facilitate the integration with existing ROS-based UAV systems.
Enhancing Semantic Similarity Understanding in Arabic NLP with Nested Embedding Learning
Aug 01, 2024



This work presents a novel framework for training Arabic nested embedding models through Matryoshka Embedding Learning, leveraging multilingual, Arabic-specific, and English-based models, to highlight the power of nested embeddings models in various Arabic NLP downstream tasks. Our innovative contribution includes the translation of various sentence similarity datasets into Arabic, enabling a comprehensive evaluation framework to compare these models across different dimensions. We trained several nested embedding models on the Arabic Natural Language Inference triplet dataset and assessed their performance using multiple evaluation metrics, including Pearson and Spearman correlations for cosine similarity, Manhattan distance, Euclidean distance, and dot product similarity. The results demonstrate the superior performance of the Matryoshka embedding models, particularly in capturing semantic nuances unique to the Arabic language. Results demonstrated that Arabic Matryoshka embedding models have superior performance in capturing semantic nuances unique to the Arabic language, significantly outperforming traditional models by up to 20-25\% across various similarity metrics. These results underscore the effectiveness of language-specific training and highlight the potential of Matryoshka models in enhancing semantic textual similarity tasks for Arabic NLP.