 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-planar 3D Printing of Double Shells
Jan 10, 2025We present a method to fabricate double shell structures printed in trans-versal directions using multi-axis fused-deposition-modeling (FDM) robot-ic 3D printing. Shell structures, characterized by lightweight, thin walls, fast buildup, and minimal material usage, find diverse applications in pro-totyping and architecture for uses such as fa\c{c}ade panels, molds for concrete casting, or full-scale pavilions. We leverage an underlying representation of transversal strip networks generated using existing methods and propose a methodology for converting them into printable partitions. Each partition is printed separately and assembled into a double-shell structure. We out-line the specifications and workflow that make the printing of each piece and the subsequent assembly process feasible. The versatility and robust-ness of our method are demonstrated with both digital and fabricated re-sults on surfaces of different scales and geometric complexity.
Parsing Geometry Using Structure-Aware Shape Templates
Sep 05, 2018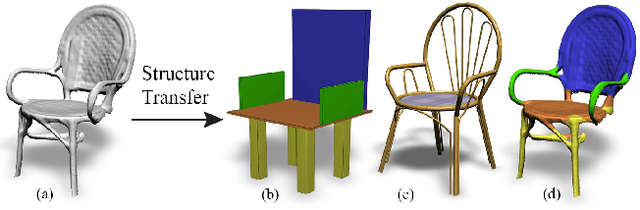
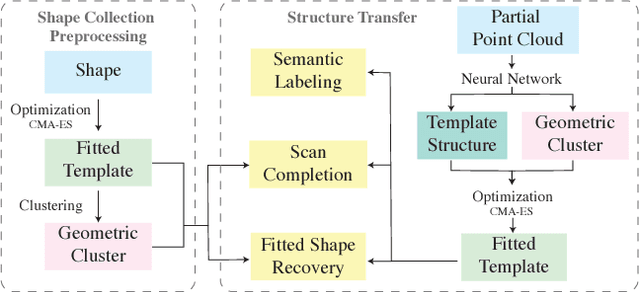
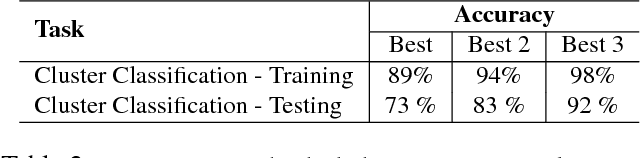
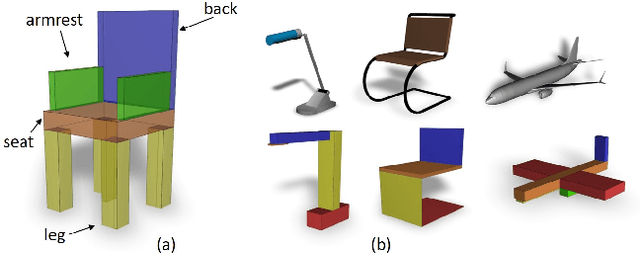
Real-life man-made objects often exhibit strong and easily-identifiable structure, as a direct result of their design or their intended functionality. Structure typically appears in the form of individual parts and their arrangement. Knowing about object structure can be an important cue for object recognition and scene understanding - a key goal for various AR and robotics applications. However, commodity RGB-D sensors used in these scenarios only produce raw, unorganized point clouds, without structural information about the captured scene. Moreover, the generated data is commonly partial and susceptible to artifacts and noise, which makes inferring the structure of scanned objects challenging. In this paper, we organize large shape collections into parameterized shape templates to capture the underlying structure of the objects. The templates allow us to transfer the structural information onto new objects and incomplete scans. We employ a deep neural network that matches the partial scan with one of the shape templates, then match and fit it to complete and detailed models from the collection. This allows us to faithfully label its parts and to guide the reconstruction of the scanned object. We showcase the effectiveness of our method by comparing it to other state-of-the-art approaches.
Learning Representations and Generative Models for 3D Point Clouds
Jun 12, 2018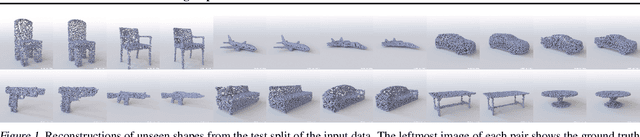
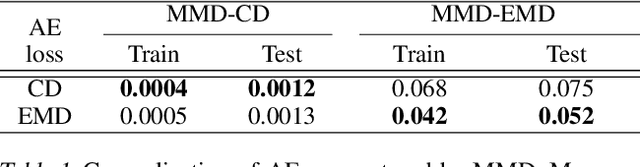

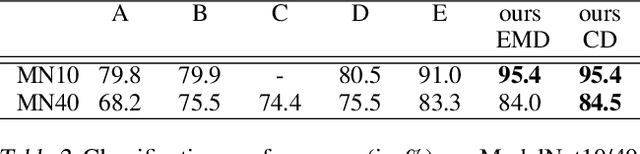
Three-dimensional geometric data offer an excellent domain for studying representation learning and generative modeling. In this paper, we look at geometric data represented as point clouds. We introduce a deep AutoEncoder (AE) network with state-of-the-art reconstruction quality and generalization ability. The learned representations outperform existing methods on 3D recognition tasks and enable shape editing via simple algebraic manipulations, such as semantic part editing, shape analogies and shape interpolation, as well as shape completion. We perform a thorough study of different generative models including GANs operating on the raw point clouds, significantly improved GANs trained in the fixed latent space of our AEs, and Gaussian Mixture Models (GMMs). To quantitatively evaluate generative models we introduce measures of sample fidelity and diversity based on matchings between sets of point clouds. Interestingly, our evaluation of generalization, fidelity and diversity reveals that GMMs trained in the latent space of our AEs yield the best results overall.