 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepSpline: Data-Driven Reconstruction of Parametric Curves and Surfaces
Jan 12, 2019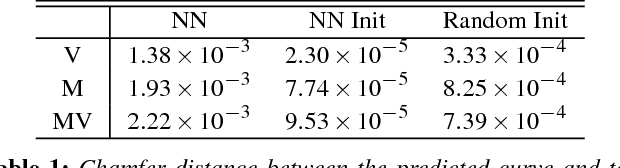
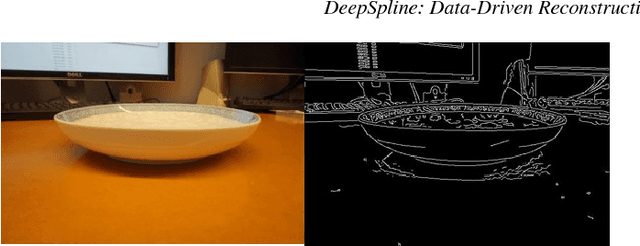

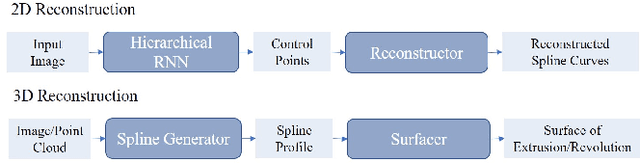
Reconstruction of geometry based on different input modes, such as images or point clouds, has been instrumental in the development of computer aided design and computer graphics. Optimal implementations of these applications have traditionally involved the use of spline-based representations at their core. Most such methods attempt to solve optimization problems that minimize an output-target mismatch. However, these optimization techniques require an initialization that is close enough, as they are local methods by nature. We propose a deep learning architecture that adapts to perform spline fitting tasks accordingly, providing complementary results to the aforementioned traditional methods. We showcase the performance of our approach, by reconstructing spline curves and surfaces based on input images or point clouds.
Parsing Geometry Using Structure-Aware Shape Templates
Sep 05, 2018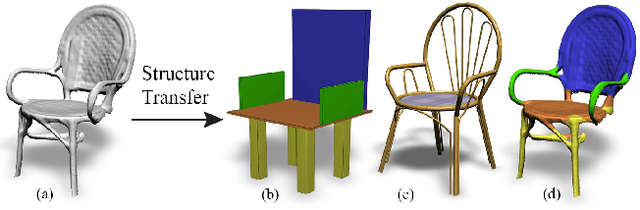
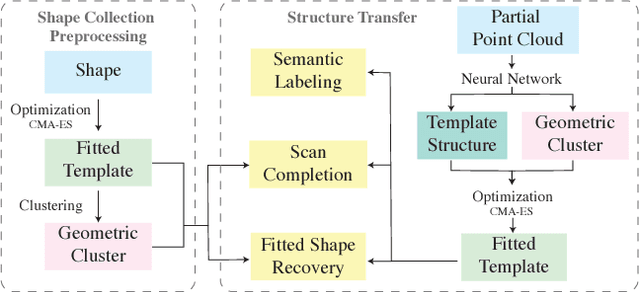
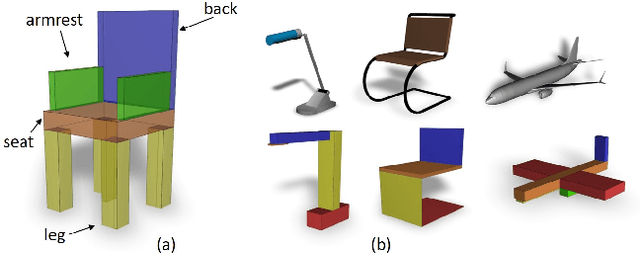
Real-life man-made objects often exhibit strong and easily-identifiable structure, as a direct result of their design or their intended functionality. Structure typically appears in the form of individual parts and their arrangement. Knowing about object structure can be an important cue for object recognition and scene understanding - a key goal for various AR and robotics applications. However, commodity RGB-D sensors used in these scenarios only produce raw, unorganized point clouds, without structural information about the captured scene. Moreover, the generated data is commonly partial and susceptible to artifacts and noise, which makes inferring the structure of scanned objects challenging. In this paper, we organize large shape collections into parameterized shape templates to capture the underlying structure of the objects. The templates allow us to transfer the structural information onto new objects and incomplete scans. We employ a deep neural network that matches the partial scan with one of the shape templates, then match and fit it to complete and detailed models from the collection. This allows us to faithfully label its parts and to guide the reconstruction of the scanned object. We showcase the effectiveness of our method by comparing it to other state-of-the-art approaches.