 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRASPLAT: Enabling dexterous grasping through novel view synthesis
Oct 22, 2025Achieving dexterous robotic grasping with multi-fingered hands remains a significant challenge. While existing methods rely on complete 3D scans to predict grasp poses, these approaches face limitations due to the difficulty of acquiring high-quality 3D data in real-world scenarios. In this paper, we introduce GRASPLAT, a novel grasping framework that leverages consistent 3D information while being trained solely on RGB images. Our key insight is that by synthesizing physically plausible images of a hand grasping an object, we can regress the corresponding hand joints for a successful grasp. To achieve this, we utilize 3D Gaussian Splatting to generate high-fidelity novel views of real hand-object interactions, enabling end-to-end training with RGB data. Unlike prior methods, our approach incorporates a photometric loss that refines grasp predictions by minimizing discrepancies between rendered and real images. We conduct extensive experiments on both synthetic and real-world grasping datasets, demonstrating that GRASPLAT improves grasp success rates up to 36.9% over existing image-based methods. Project page: https://mbortolon97.github.io/grasplat/
HERB: Human-augmented Efficient Reinforcement learning for Bin-packing
Apr 23, 2025Packing objects efficiently is a fundamental problem in logistics, warehouse automation, and robotics. While traditional packing solutions focus on geometric optimization, packing irregular, 3D objects presents significant challenges due to variations in shape and stability. Reinforcement Learning~(RL) has gained popularity in robotic packing tasks, but training purely from simulation can be inefficient and computationally expensive. In this work, we propose HERB, a human-augmented RL framework for packing irregular objects. We first leverage human demonstrations to learn the best sequence of objects to pack, incorporating latent factors such as space optimization, stability, and object relationships that are difficult to model explicitly. Next, we train a placement algorithm that uses visual information to determine the optimal object positioning inside a packing container. Our approach is validated through extensive performance evaluations, analyzing both packing efficiency and latency. Finally, we demonstrate the real-world feasibility of our method on a robotic system. Experimental results show that our method outperforms geometric and purely RL-based approaches by leveraging human intuition, improving both packing robustness and adaptability. This work highlights the potential of combining human expertise-driven RL to tackle complex real-world packing challenges in robotic systems.
Measuring Uncertainty in Shape Completion to Improve Grasp Quality
Apr 22, 2025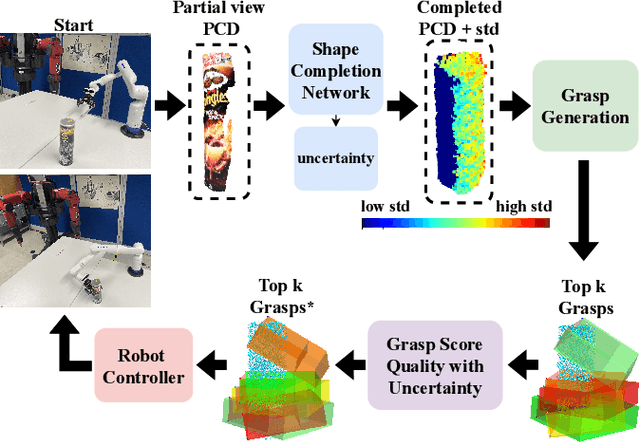
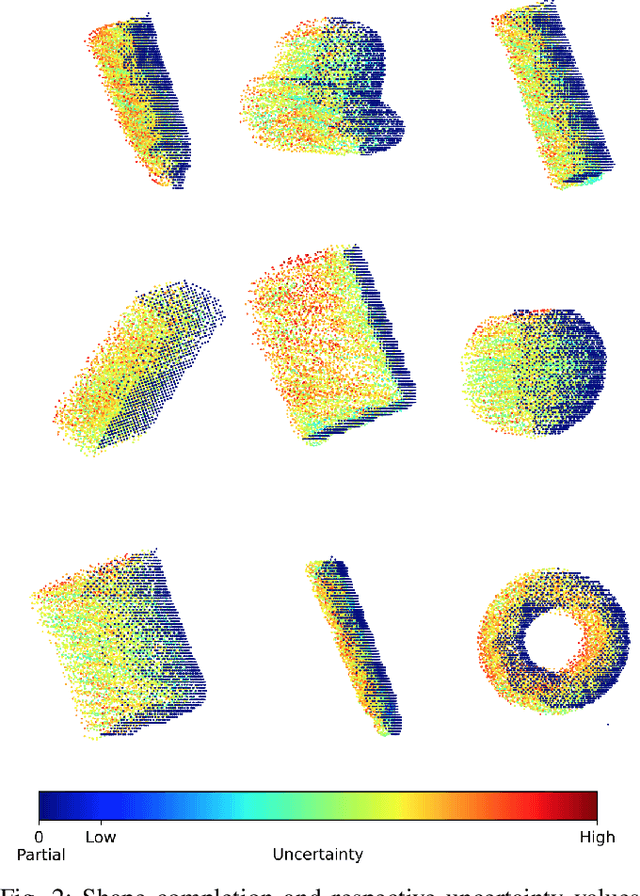

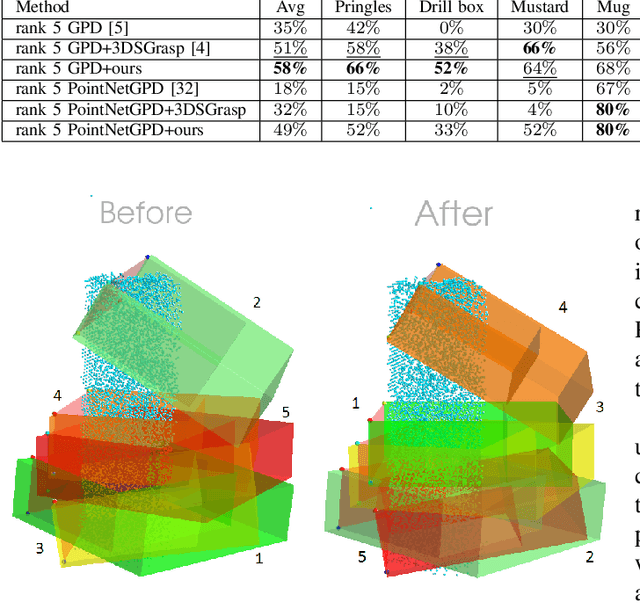
Shape completion networks have been used recently in real-world robotic experiments to complete the missing/hidden information in environments where objects are only observed in one or few instances where self-occlusions are bound to occur. Nowadays, most approaches rely on deep neural networks that handle rich 3D point cloud data that lead to more precise and realistic object geometries. However, these models still suffer from inaccuracies due to its nondeterministic/stochastic inferences which could lead to poor performance in grasping scenarios where these errors compound to unsuccessful grasps. We present an approach to calculate the uncertainty of a 3D shape completion model during inference of single view point clouds of an object on a table top. In addition, we propose an update to grasp pose algorithms quality score by introducing the uncertainty of the completed point cloud present in the grasp candidates. To test our full pipeline we perform real world grasping with a 7dof robotic arm with a 2 finger gripper on a large set of household objects and compare against previous approaches that do not measure uncertainty. Our approach ranks the grasp quality better, leading to higher grasp success rate for the rank 5 grasp candidates compared to state of the art.
Expressing and Inferring Action Carefulness in Human-to-Robot Handovers
Sep 30, 2023Implicit communication plays such a crucial role during social exchanges that it must be considered for a good experience in human-robot interaction. This work addresses implicit communication associated with the detection of physical properties, transport, and manipulation of objects. We propose an ecological approach to infer object characteristics from subtle modulations of the natural kinematics occurring during human object manipulation. Similarly, we take inspiration from human strategies to shape robot movements to be communicative of the object properties while pursuing the action goals. In a realistic HRI scenario, participants handed over cups - filled with water or empty - to a robotic manipulator that sorted them. We implemented an online classifier to differentiate careful/not careful human movements, associated with the cups' content. We compared our proposed "expressive" controller, which modulates the movements according to the cup filling, against a neutral motion controller. Results show that human kinematics is adjusted during the task, as a function of the cup content, even in reach-to-grasp motion. Moreover, the carefulness during the handover of full cups can be reliably inferred online, well before action completion. Finally, although questionnaires did not reveal explicit preferences from participants, the expressive robot condition improved task efficiency.
If You Are Careful, So Am I! How Robot Communicative Motions Can Influence Human Approach in a Joint Task
Oct 24, 2022As humans, we have a remarkable capacity for reading the characteristics of objects only by observing how another person carries them. Indeed, how we perform our actions naturally embeds information on the item features. Collaborative robots can achieve the same ability by modulating the strategy used to transport objects with their end-effector. A contribution in this sense would promote spontaneous interactions by making an implicit yet effective communication channel available. This work investigates if humans correctly perceive the implicit information shared by a robotic manipulator through its movements during a dyadic collaboration task. Exploiting a generative approach, we designed robot actions to convey virtual properties of the transported objects, particularly to inform the partner if any caution is required to handle the carried item. We found that carefulness is correctly interpreted when observed through the robot movements. In the experiment, we used identical empty plastic cups; nevertheless, participants approached them differently depending on the attitude shown by the robot: humans change how they reach for the object, being more careful whenever the robot does the same. This emerging form of motor contagion is entirely spontaneous and happens even if the task does not require it.
Learning Motor Resonance in Human-Human and Human-Robot Interaction with Coupled Dynamical System
May 10, 2019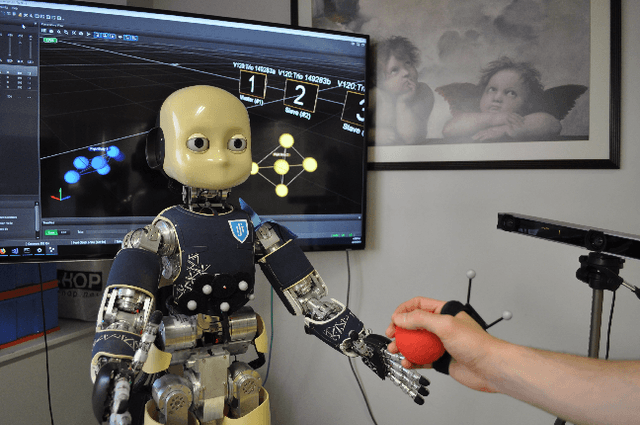


Human interaction involves very sophisticated non-verbal communication skills like understanding the goals and actions of others and coordinating our own actions accordingly. Neuroscience refers to this mechanism as motor resonance, in the sense that the perception of another person's actions and sensory experiences activates the observer's brain as if (s)he would be performing the same actions and having the same experiences. We analyze and model non-verbal cues (arm movements) exchanged between two humans that interact and execute handover actions. The contributions of this paper are the following: (i) computational models, using recorded motion data, describing the motor behaviour of each actor in action-in-interaction situations, (ii) a computational model that captures the behaviour if the "giver" and "receiver" during an object handover action, by coupling the arm motion of both actors, and (iii) embedded these models in the iCub robot for both action execution and recognition. Our results show that: (i) the robot can interpret the human arm motion and recognize handover actions; and (ii) behave in a "human-like" manner to receive the object of the recognized handover action.