 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of the AI-HRI Symposium at AAAI-FSS 2019
Sep 19, 2019The past few years have seen rapid progress in the development of service robots. Universities and companies alike have launched major research efforts toward the deployment of ambitious systems designed to aid human operators performing a variety of tasks. These robots are intended to make those who may otherwise need to live in assisted care facilities more independent, to help workers perform their jobs, or simply to make life more convenient. Service robots provide a powerful platform on which to study Artificial Intelligence (AI) and Human-Robot Interaction (HRI) in the real world. Research sitting at the intersection of AI and HRI is crucial to the success of service robots if they are to fulfill their mission. This symposium seeks to highlight research enabling robots to effectively interact with people autonomously while modeling, planning, and reasoning about the environment that the robot operates in and the tasks that it must perform. AI-HRI deals with the challenge of interacting with humans in environments that are relatively unstructured or which are structured around people rather than machines, as well as the possibility that the robot may need to interact naturally with people rather than through teach pendants, programming, or similar interfaces.
Proceedings of the AI-HRI Symposium at AAAI-FSS 2018
Sep 18, 2018The goal of the Interactive Learning for Artificial Intelligence (AI) for Human-Robot Interaction (HRI) symposium is to bring together the large community of researchers working on interactive learning scenarios for interactive robotics. While current HRI research involves investigating ways for robots to effectively interact with people, HRI's overarching goal is to develop robots that are autonomous while intelligently modeling and learning from humans. These goals greatly overlap with some central goals of AI and interactive machine learning, such that HRI is an extremely challenging problem domain for interactive learning and will elicit fresh problem areas for robotics research. Present-day AI research still does not widely consider situations for interacting directly with humans and within human-populated environments, which present inherent uncertainty in dynamics, structure, and interaction. We believe that the HRI community already offers a rich set of principles and observations that can be used to structure new models of interaction. The human-aware AI initiative has primarily been approached through human-in-the-loop methods that use people's data and feedback to improve refinement and performance of the algorithms, learned functions, and personalization. We thus believe that HRI is an important component to furthering AI and robotics research.
Towards learning through robotic interaction alone: the joint guided search task
Jun 08, 2016

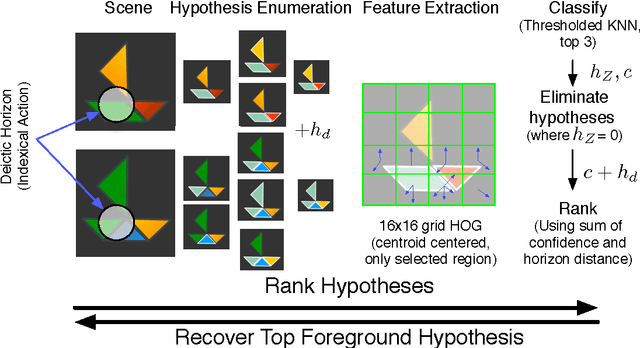
This work proposes a biologically inspired approach that focuses on attention systems that are able to inhibit or constrain what is relevant at any one moment. We propose a radically new approach to making progress in human-robot joint attention called "the joint guided search task". Visual guided search is the activity of the eye as it saccades from position to position recognizing objects in each fixation location until the target object is found. Our research focuses on the exchange of nonverbal behavior toward changing the fixation location while also performing object recognition. Our main goal is a very ambitious goal of sharing attention through probing synthetic foreground maps (i.e. what is being considered by the robotic agent) and the biological attention system of the human.
NIMBUS: A Hybrid Cloud-Crowd Realtime Architecture for Visual Learning in Interactive Domains
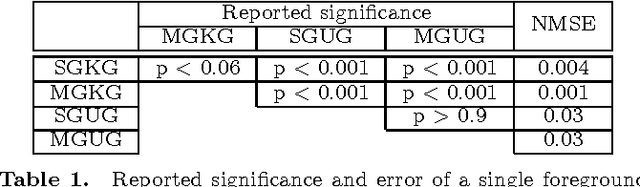
Feb 24, 2016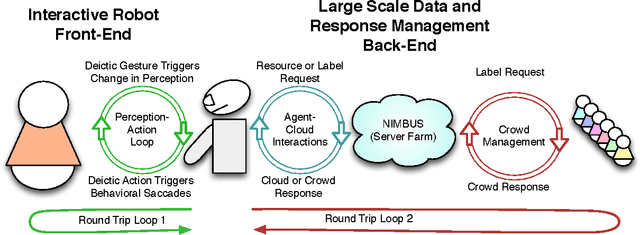
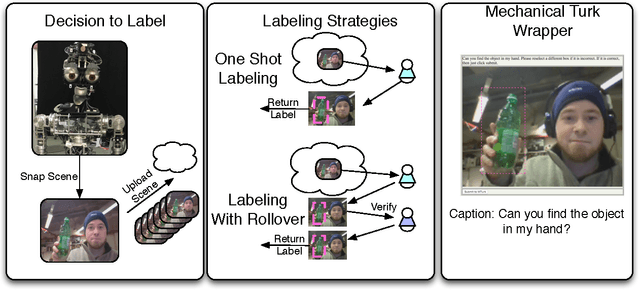
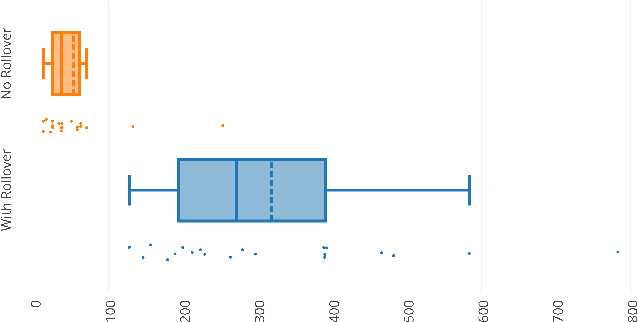
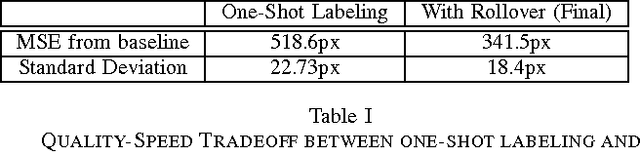
Robotic architectures that incorporate cloud-based resources are just now gaining popularity. However, researchers have very few investigations into their capabilities to support claims of their feasibility. We propose a novel method to exchange quality for speed of response. Further, we back this assertion with empirical findings from experiments performed with Amazon Mechanical Turk and find that our method improves quality in exchange for response time in our cognitive architecture.