 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dynamic Heterogeneous Team-based Non-iterative Approach for Online Pick-up and Just-In-Time Delivery Problems
Apr 14, 2023



This paper presents a non-iterative approach for finding the assignment of heterogeneous robots to efficiently execute online Pickup and Just-In-Time Delivery (PJITD) tasks with optimal resource utilization. The PJITD assignments problem is formulated as a spatio-temporal multi-task assignment (STMTA) problem. The physical constraints on the map and vehicle dynamics are incorporated in the cost formulation. The linear sum assignment problem is formulated for the heterogeneous STMTA problem. The recently proposed Dynamic Resource Allocation with Multi-task assignments (DREAM) approach has been modified to solve the heterogeneous PJITD problem. At the start, it computes the minimum number of robots required (with their types) to execute given heterogeneous PJITD tasks. These required robots are added to the team to guarantee the feasibility of all PJITD tasks. Then robots in an updated team are assigned to execute the PJITD tasks while minimizing the total cost for the team to execute all PJITD tasks. The performance of the proposed non-iterative approach has been validated using high-fidelity software-in-loop simulations and hardware experiments. The simulations and experimental results clearly indicate that the proposed approach is scalable and provides optimal resource utilization.
CORNET 2.0: A Co-Simulation Middleware forRobot Networks
Sep 14, 2021
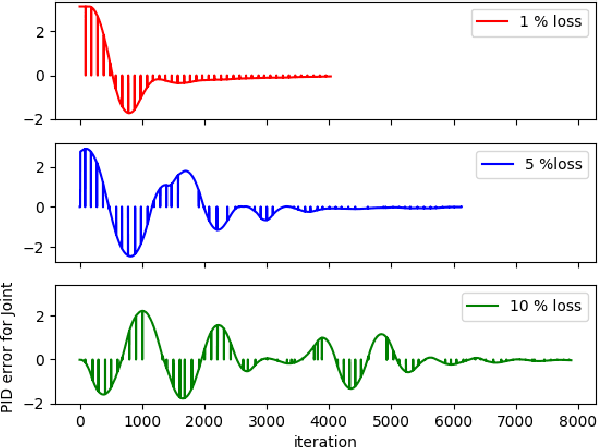
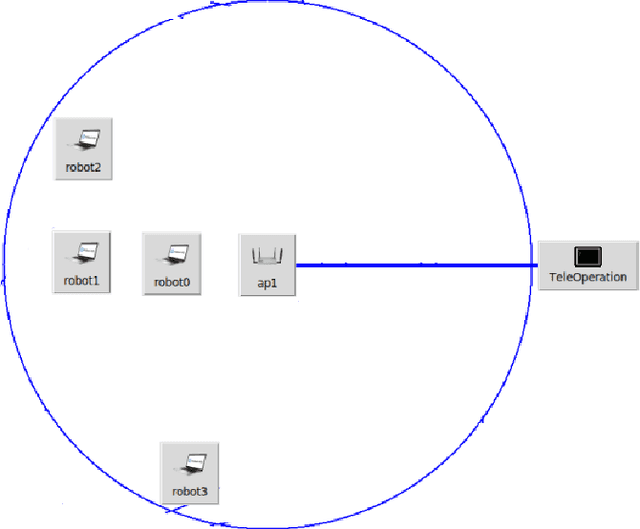

We present a networked co-simulation framework for multi-robot systems applications. We require a simulation framework that captures both physical interactions and communications aspects to effectively design such complex systems. This is necessary to co-design the multi-robots' autonomy logic and the communication protocols. The proposed framework extends existing tools to simulate the robot's autonomy and network-related aspects. We have used Gazebo with ROS/ROS2 to develop the autonomy logic for robots and mininet-WiFi as the network simulator to capture the cyber-physical systems properties of the multi-robot system. This framework addresses the need to seamlessly integrate the two simulation environments by synchronizing mobility and time, allowing for easy migration of the algorithms to real platforms.
RRT-CoLearn: towards kinodynamic planning without numerical trajectory optimization
Oct 27, 2017
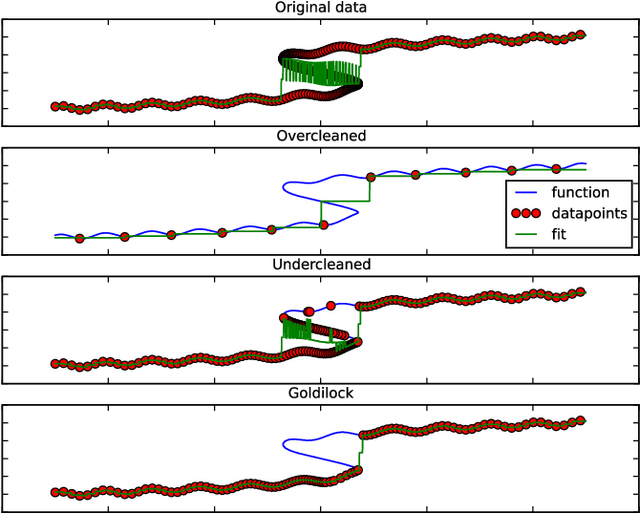
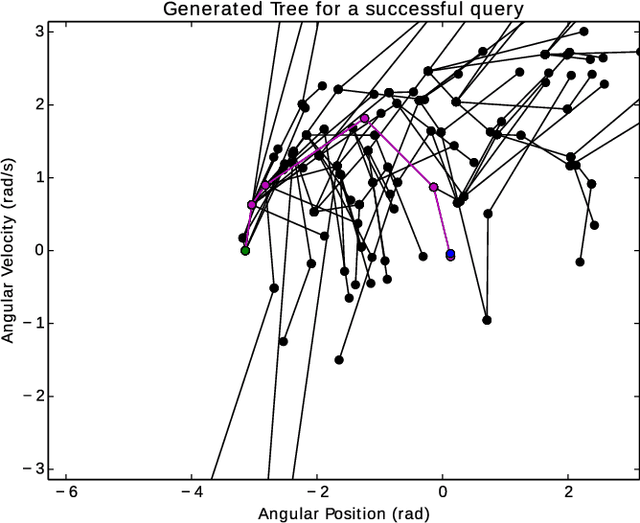
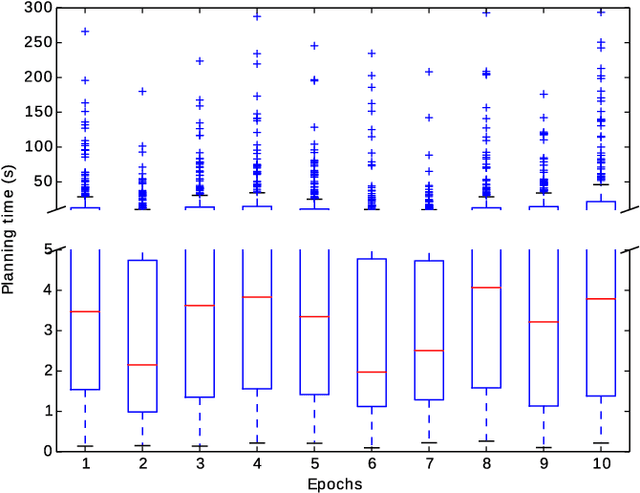
Sampling-based kinodynamic planners, such as Rapidly-exploring Random Trees (RRTs), pose two fundamental challenges: computing a reliable (pseudo-)metric for the distance between two randomly sampled nodes, and computing a steering input to connect the nodes. The core of these challenges is a Two Point Boundary Value Problem, which is known to be NP-hard. Recently, the distance metric has been approximated using supervised learning, reducing computation time drastically. The previous work on such learning RRTs use direct optimal control to generate the data for supervised learning. This paper proposes to use indirect optimal control instead, because it provides two benefits: it reduces the computational effort to generate the data, and it provides a low dimensional parametrization of the action space. The latter allows us to learn both the distance metric and the steering input to connect two nodes. This eliminates the need for a local planner in learning RRTs. Experimental results on a pendulum swing up show 10-fold speed-up in both the offline data generation and the online planning time, leading to at least a 10-fold speed-up in the overall planning time.
Team Delft's Robot Winner of the Amazon Picking Challenge 2016
Oct 18, 2016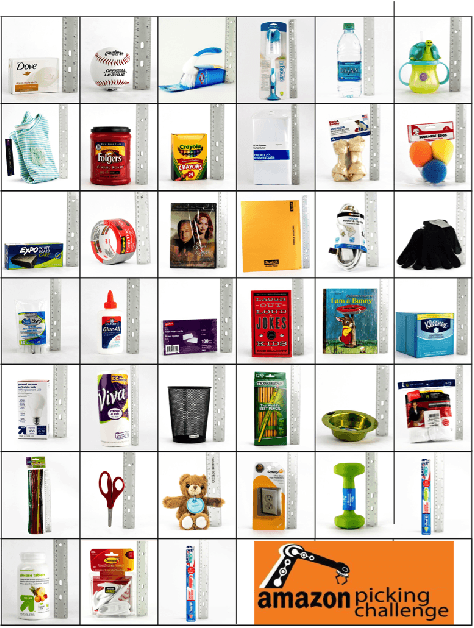
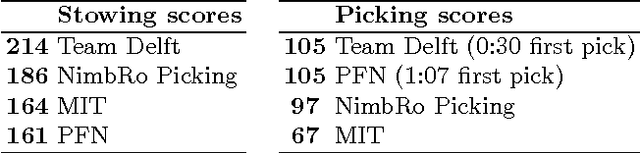
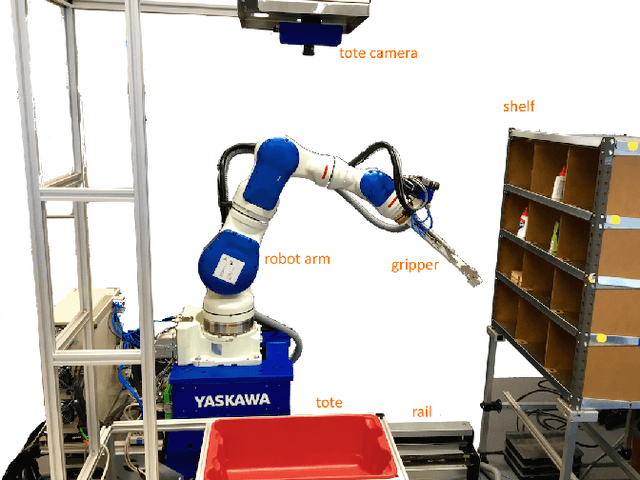
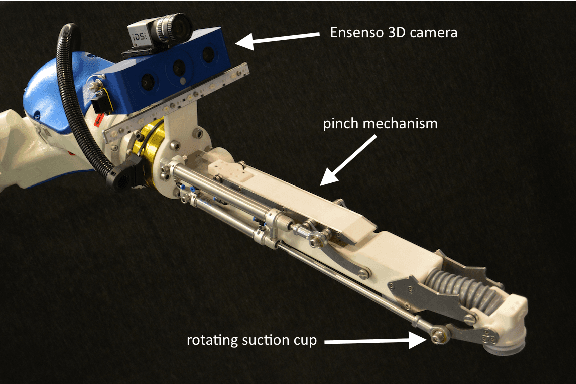
This paper describes Team Delft's robot, which won the Amazon Picking Challenge 2016, including both the Picking and the Stowing competitions. The goal of the challenge is to automate pick and place operations in unstructured environments, specifically the shelves in an Amazon warehouse. Team Delft's robot is based on an industrial robot arm, 3D cameras and a customized gripper. The robot's software uses ROS to integrate off-the-shelf components and modules developed specifically for the competition, implementing Deep Learning and other AI techniques for object recognition and pose estimation, grasp planning and motion planning. This paper describes the main components in the system, and discusses its performance and results at the Amazon Picking Challenge 2016 finals.