 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Resource-Efficient Decentralized Sequential Planner for Spatiotemporal Wildfire Mitigation
Jul 27, 2024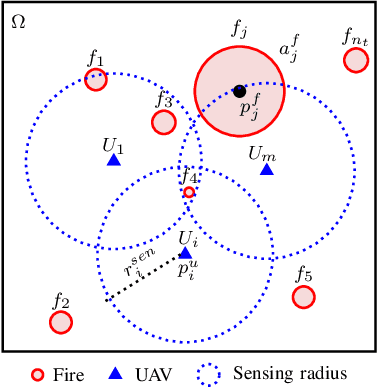
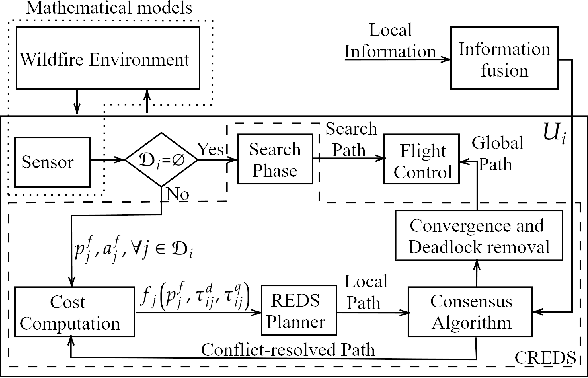
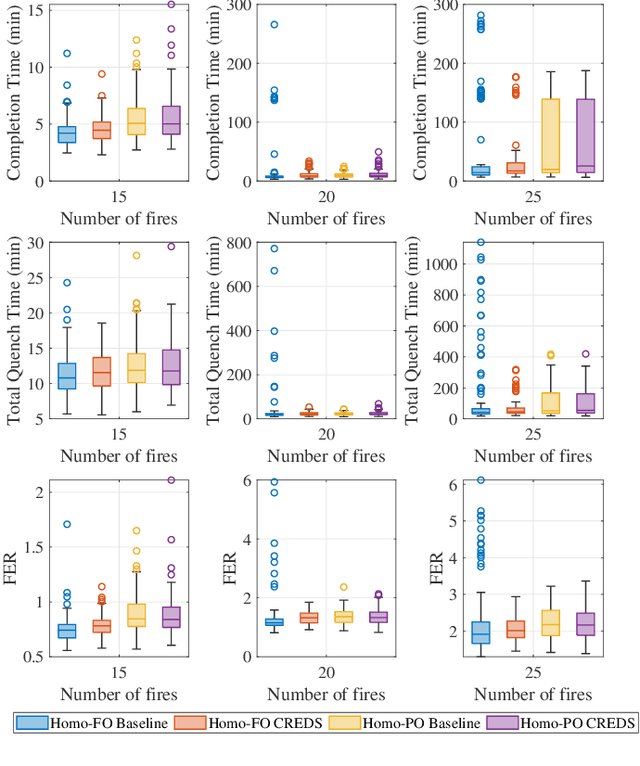
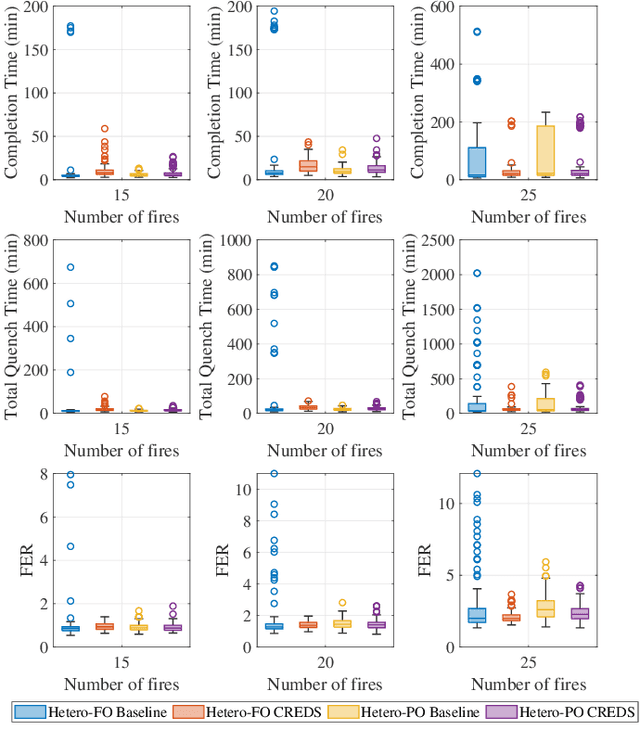
This paper proposes a Conflict-aware Resource-Efficient Decentralized Sequential planner (CREDS) for early wildfire mitigation using multiple heterogeneous Unmanned Aerial Vehicles (UAVs). Multi-UAV wildfire management scenarios are non-stationary, with spatially clustered dynamically spreading fires, potential pop-up fires, and partial observability due to limited UAV numbers and sensing range. The objective of CREDS is to detect and sequentially mitigate all growing fires as Single-UAV Tasks (SUT), minimizing biodiversity loss through rapid UAV intervention and promoting efficient resource utilization by avoiding complex multi-UAV coordination. CREDS employs a three-phased approach, beginning with fire detection using a search algorithm, followed by local trajectory generation using the auction-based Resource-Efficient Decentralized Sequential planner (REDS), incorporating the novel non-stationary cost function, the Deadline-Prioritized Mitigation Cost (DPMC). Finally, a conflict-aware consensus algorithm resolves conflicts to determine a global trajectory for spatiotemporal mitigation. The performance evaluation of the CREDS for partial and full observability conditions with both heterogeneous and homogeneous UAV teams for different fires-to-UAV ratios demonstrates a $100\%$ success rate for ratios up to $4$ and a high success rate for the critical ratio of $5$, outperforming baselines. Heterogeneous UAV teams outperform homogeneous teams in handling heterogeneous deadlines of SUT mitigation. CREDS exhibits scalability and $100\%$ convergence, demonstrating robustness against potential deadlock assignments, enhancing its success rate compared to the baseline approaches.
Priority-based DREAM Approach for Highly Manoeuvring Intruders in A Perimeter Defense Problem
Jul 19, 2023



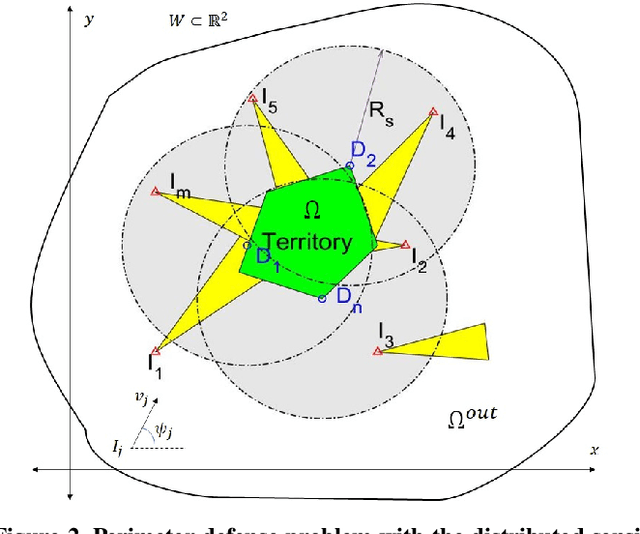
In this paper, a Priority-based Dynamic REsource Allocation with decentralized Multi-task assignment (P-DREAM) approach is presented to protect a territory from highly manoeuvring intruders. In the first part, static optimization problems are formulated to compute the following parameters of the perimeter defense problem; the number of reserve stations, their locations, the priority region, the monitoring region, and the minimum number of defenders required for the monitoring purpose. The concept of a prioritized intruder is proposed here to identify and handle those critical intruders (computed based on the velocity ratio and location) to be tackled on a priority basis. The computed priority region helps to assign reserve defenders sufficiently earlier such that they can neutralize the prioritized intruders. The monitoring region defines the minimum region to be monitored and is sufficient enough to handle the intruders. In the second part, the earlier developed DREAM approach is modified to incorporate the priority of an intruder. The proposed P-DREAM approach assigns the defenders to the prioritized intruders as the first task. A convex territory protection problem is simulated to illustrate the P-DREAM approach. It involves the computation of static parameters and solving the prioritized task assignments with dynamic resource allocation. Monte-Carlo results were conducted to verify the performance of P-DREAM, and the results clearly show that the P-DREAM approach can protect the territory with consistent performance against highly manoeuvring intruders.
A Decentralized Spike-based Learning Framework for Sequential Capture in Discrete Perimeter Defense Problem
May 26, 2023



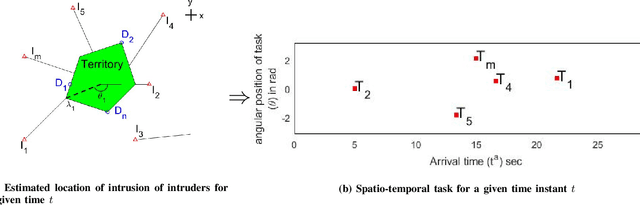
This paper proposes a novel Decentralized Spike-based Learning (DSL) framework for the discrete Perimeter Defense Problem (d-PDP). A team of defenders is operating on the perimeter to protect the circular territory from radially incoming intruders. At first, the d-PDP is formulated as a spatio-temporal multi-task assignment problem (STMTA). The problem of STMTA is then converted into a multi-label learning problem to obtain labels of segments that defenders have to visit in order to protect the perimeter. The DSL framework uses a Multi-Label Classifier using Synaptic Efficacy Function spiking neuRON (MLC-SEFRON) network for deterministic multi-label learning. Each defender contains a single MLC-SEFRON network. Each MLC-SEFRON network is trained independently using input from its own perspective for decentralized operations. The input spikes to the MLC-SEFRON network can be directly obtained from the spatio-temporal information of defenders and intruders without any extra pre-processing step. The output of MLC-SEFRON contains the labels of segments that a defender has to visit in order to protect the perimeter. Based on the multi-label output from the MLC-SEFRON a trajectory is generated for a defender using a Consensus-Based Bundle Algorithm (CBBA) in order to capture the intruders. The target multi-label output for training MLC-SEFRON is obtained from an expert policy. Also, the MLC-SEFRON trained for a defender can be directly used for obtaining labels of segments assigned to another defender without any retraining. The performance of MLC-SEFRON has been evaluated for full observation and partial observation scenarios of the defender. The overall performance of the DSL framework is then compared with expert policy along with other existing learning algorithms. The scalability of the DSL has been evaluated using an increasing number of defenders.
A Dynamic Heterogeneous Team-based Non-iterative Approach for Online Pick-up and Just-In-Time Delivery Problems
Apr 14, 2023



This paper presents a non-iterative approach for finding the assignment of heterogeneous robots to efficiently execute online Pickup and Just-In-Time Delivery (PJITD) tasks with optimal resource utilization. The PJITD assignments problem is formulated as a spatio-temporal multi-task assignment (STMTA) problem. The physical constraints on the map and vehicle dynamics are incorporated in the cost formulation. The linear sum assignment problem is formulated for the heterogeneous STMTA problem. The recently proposed Dynamic Resource Allocation with Multi-task assignments (DREAM) approach has been modified to solve the heterogeneous PJITD problem. At the start, it computes the minimum number of robots required (with their types) to execute given heterogeneous PJITD tasks. These required robots are added to the team to guarantee the feasibility of all PJITD tasks. Then robots in an updated team are assigned to execute the PJITD tasks while minimizing the total cost for the team to execute all PJITD tasks. The performance of the proposed non-iterative approach has been validated using high-fidelity software-in-loop simulations and hardware experiments. The simulations and experimental results clearly indicate that the proposed approach is scalable and provides optimal resource utilization.
A Non-iterative Spatio-temporal Multi-task Assignments based Collision-free Trajectories for Music Playing Robots
Oct 14, 2022


In this paper, a non-iterative spatio-temporal multi-task assignment approach is used for playing the piano music by a team of robots. This paper considers the piano playing problem, in which an algorithm needs to compute the trajectories for a dynamically sized team of robots who will play the musical notes by traveling through the specific locations associated with musical notes at their respective specific times. A two-step dynamic resource allocation based on a spatio-temporal multi-task assignment problem (DREAM), has been implemented to assign robots for playing the musical tune. The algorithm computes the required number of robots to play the music in the first step. In the second step, optimal assignments are computed for the updated team of robots, which minimizes the total distance traveled by the team. Furthermore, if robots are operating in Euclidean space, then the solution of DREAM approach provides collision-free trajectories, and the same has been proven. The working of DREAM approach has been illustrated with the help of the high fidelity simulations in Gazebo operated using ROS2. The result clearly shows that the DREAM approach computes the required number of robots and assigns multiple tasks to robots in at most two step. The simulation of the robots playing music, using computed assignments, is demonstrated in the attached video. video link: \url{https://youtu.be/XToicNm-CO8}
A Decentralized Multi-UAV Spatio-Temporal Multi-Task Allocation Approach for Perimeter Defense
Feb 15, 2021
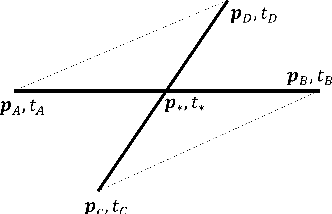
This paper provides a new solution approach to a multi-player perimeter defense game, in which the intruders' team tries to enter the territory, and a team of defenders protects the territory by capturing intruders on the perimeter of the territory. The objective of the defenders is to detect and capture the intruders before the intruders enter the territory. Each defender independently senses the intruder and computes his trajectory to capture the assigned intruders in a cooperative fashion. The intruder is estimated to reach a specific location on the perimeter at a specific time. Each intruder is viewed as a spatio-temporal task, and the defenders are assigned to execute these spatio-temporal tasks. At any given time, the perimeter defense problem is converted into a Decentralized Multi-UAV Spatio-Temporal Multi-Task Allocation (DMUST-MTA) problem. The cost of executing a task for a trajectory is defined by a composite cost function of both the spatial and temporal components. In this paper, a decentralized consensus-based bundle algorithm has been modified to solve the spatio-temporal multi-task allocation problem, and the performance evaluation of the proposed approach is carried out based on Monte-Carlo simulations. The simulation results show the effectiveness of the proposed approach to solve the perimeter defense game under different scenarios. Performance comparison with a state-of-the-art centralized approach with full observability, clearly indicates that DMUST-MTA achieves similar performance in a decentralized way with partial observability conditions with a lesser computational time and easy scaling up.