 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Decentralized Multi-UAV Spatio-Temporal Multi-Task Allocation Approach for Perimeter Defense
Paper and Code
Feb 15, 2021
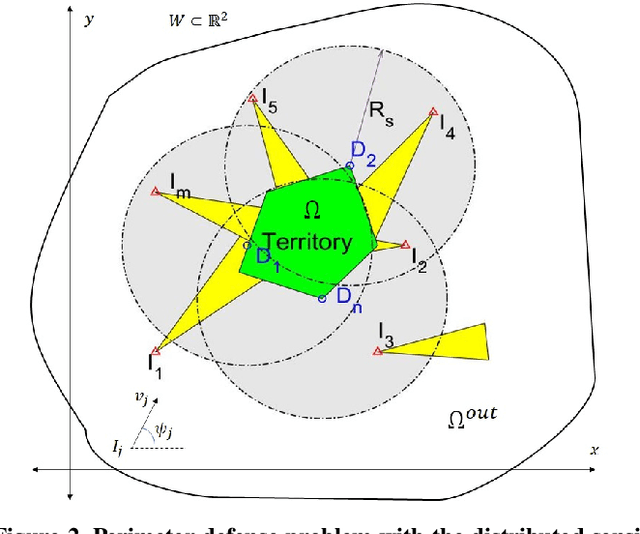
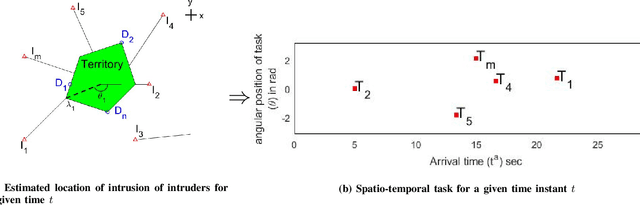
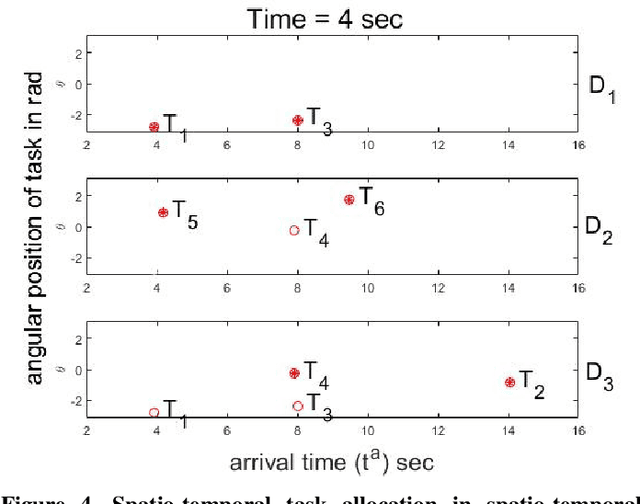
This paper provides a new solution approach to a multi-player perimeter defense game, in which the intruders' team tries to enter the territory, and a team of defenders protects the territory by capturing intruders on the perimeter of the territory. The objective of the defenders is to detect and capture the intruders before the intruders enter the territory. Each defender independently senses the intruder and computes his trajectory to capture the assigned intruders in a cooperative fashion. The intruder is estimated to reach a specific location on the perimeter at a specific time. Each intruder is viewed as a spatio-temporal task, and the defenders are assigned to execute these spatio-temporal tasks. At any given time, the perimeter defense problem is converted into a Decentralized Multi-UAV Spatio-Temporal Multi-Task Allocation (DMUST-MTA) problem. The cost of executing a task for a trajectory is defined by a composite cost function of both the spatial and temporal components. In this paper, a decentralized consensus-based bundle algorithm has been modified to solve the spatio-temporal multi-task allocation problem, and the performance evaluation of the proposed approach is carried out based on Monte-Carlo simulations. The simulation results show the effectiveness of the proposed approach to solve the perimeter defense game under different scenarios. Performance comparison with a state-of-the-art centralized approach with full observability, clearly indicates that DMUST-MTA achieves similar performance in a decentralized way with partial observability conditions with a lesser computational time and easy scaling up.