 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Resource-Efficient Decentralized Sequential Planner for Spatiotemporal Wildfire Mitigation
Jul 27, 2024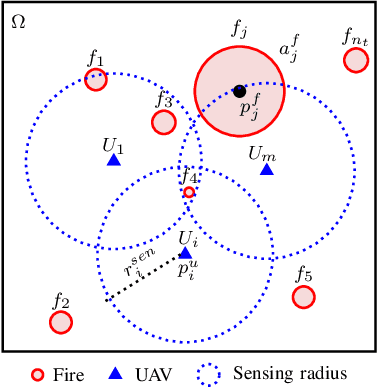
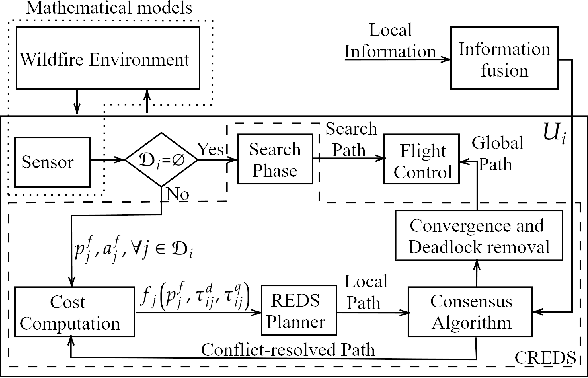
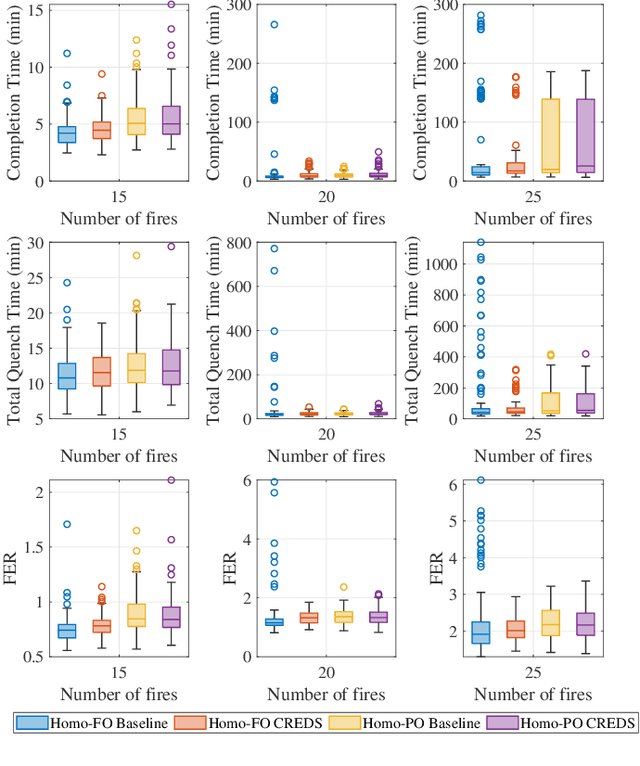
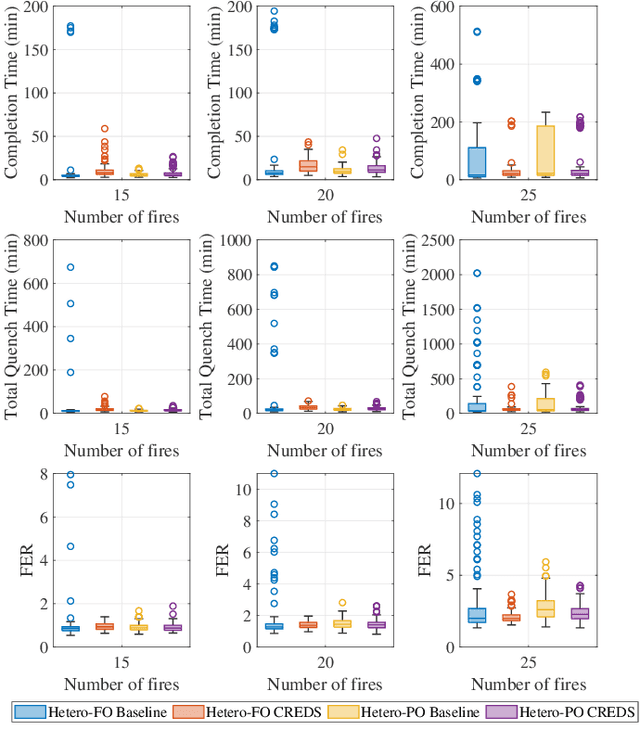
This paper proposes a Conflict-aware Resource-Efficient Decentralized Sequential planner (CREDS) for early wildfire mitigation using multiple heterogeneous Unmanned Aerial Vehicles (UAVs). Multi-UAV wildfire management scenarios are non-stationary, with spatially clustered dynamically spreading fires, potential pop-up fires, and partial observability due to limited UAV numbers and sensing range. The objective of CREDS is to detect and sequentially mitigate all growing fires as Single-UAV Tasks (SUT), minimizing biodiversity loss through rapid UAV intervention and promoting efficient resource utilization by avoiding complex multi-UAV coordination. CREDS employs a three-phased approach, beginning with fire detection using a search algorithm, followed by local trajectory generation using the auction-based Resource-Efficient Decentralized Sequential planner (REDS), incorporating the novel non-stationary cost function, the Deadline-Prioritized Mitigation Cost (DPMC). Finally, a conflict-aware consensus algorithm resolves conflicts to determine a global trajectory for spatiotemporal mitigation. The performance evaluation of the CREDS for partial and full observability conditions with both heterogeneous and homogeneous UAV teams for different fires-to-UAV ratios demonstrates a $100\%$ success rate for ratios up to $4$ and a high success rate for the critical ratio of $5$, outperforming baselines. Heterogeneous UAV teams outperform homogeneous teams in handling heterogeneous deadlines of SUT mitigation. CREDS exhibits scalability and $100\%$ convergence, demonstrating robustness against potential deadlock assignments, enhancing its success rate compared to the baseline approaches.
Genetic Algorithm-based Routing and Scheduling for Wildfire Suppression using a Team of UAVs
Jul 27, 2024



This paper addresses early wildfire management using a team of UAVs for the mitigation of fires. The early detection and mitigation systems help in alleviating the destruction with reduced resource utilization. A Genetic Algorithm-based Routing and Scheduling with Time constraints (GARST) is proposed to find the shortest schedule route to mitigate the fires as Single UAV Tasks (SUT). The objective of GARST is to compute the route and schedule of the UAVs so that the UAVS reach the assigned fire locations before the fire becomes a Multi UAV Task (MUT) and completely quench the fire using the extinguisher. The fitness function used for the genetic algorithm is the total quench time for mitigation of total fires. The selection, crossover, mutation operators, and elitist strategies collectively ensure the exploration and exploitation of the solution space, maintaining genetic diversity, preventing premature convergence, and preserving high-performing individuals for the effective optimization of solutions. The GARST effectively addresses the challenges posed by the NP-complete problem of routing and scheduling for growing tasks with time constraints. The GARST is able to handle infeasible scenarios effectively, contributing to the overall optimization of the wildfire management system.
An Efficient Approach with Dynamic Multi-Swarm of UAVs for Forest Firefighting
Nov 03, 2022



In this paper, the Multi-Swarm Cooperative Information-driven search and Divide and Conquer mitigation control (MSCIDC) approach is proposed for faster detection and mitigation of forest fire by reducing the loss of biodiversity, nutrients, soil moisture, and other intangible benefits. A swarm is a cooperative group of Unmanned Aerial Vehicles (UAVs) that fly together to search and quench the fire effectively. The multi-swarm cooperative information-driven search uses a multi-level search comprising cooperative information-driven exploration and exploitation for quick/accurate detection of fire location. The search level is selected based on the thermal sensor information about the potential fire area. The dynamicity of swarms, aided by global regulative repulsion and merging between swarms, reduces the detection and mitigation time compared to the existing methods. The local attraction among the members of the swarm helps the non-detector members to reach the fire location faster, and divide-and-conquer mitigation control ensures a non-overlapping fire sector allocation for all members quenching the fire. The performance of MSCIDC has been compared with different multi-UAV methods using a simulated environment of pine forest. The performance clearly shows that MSCIDC mitigates fire much faster than the multi-UAV methods. The Monte-Carlo simulation results indicate that the proposed method reduces the average forest area burnt by $65\%$ and mission time by $60\%$ compared to the best result case of the multi-UAV approaches, guaranteeing a faster and successful mission.