 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Resource-Efficient Decentralized Sequential Planner for Spatiotemporal Wildfire Mitigation
Paper and Code
Jul 27, 2024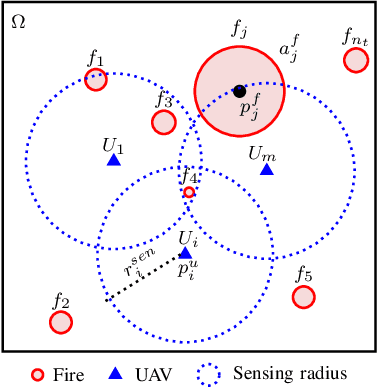
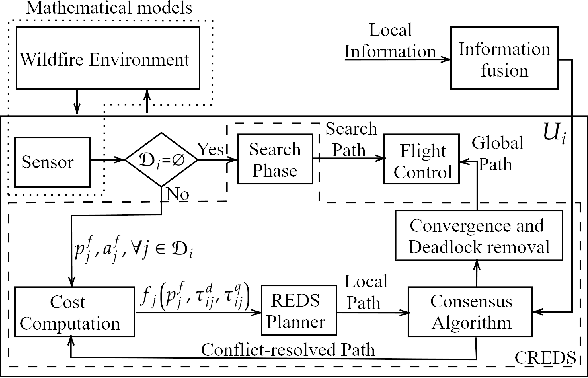
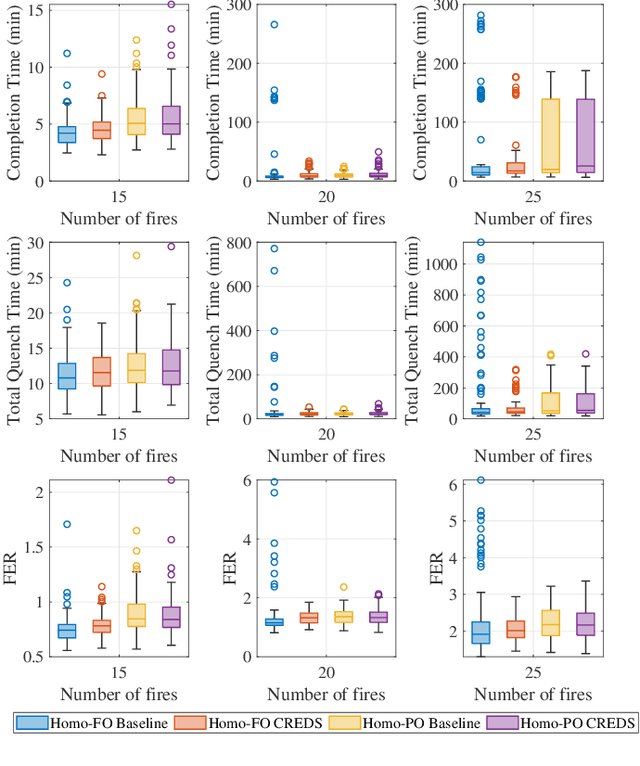
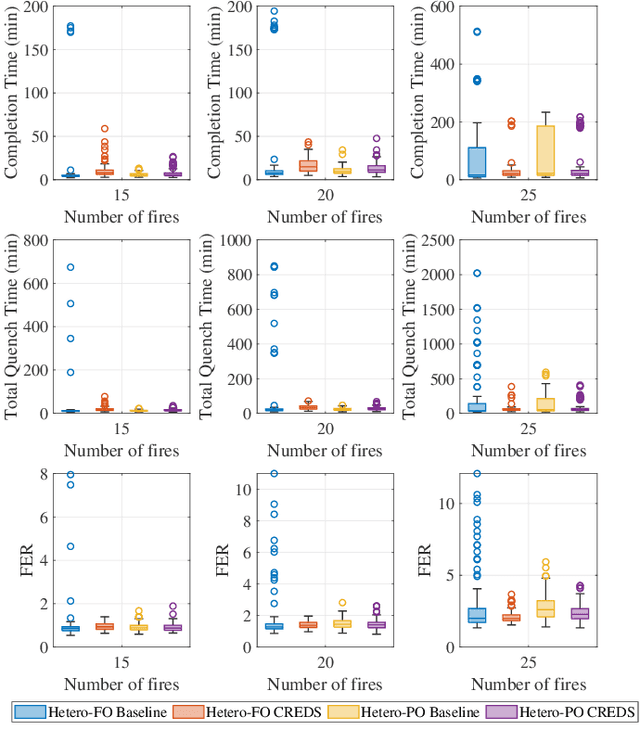
This paper proposes a Conflict-aware Resource-Efficient Decentralized Sequential planner (CREDS) for early wildfire mitigation using multiple heterogeneous Unmanned Aerial Vehicles (UAVs). Multi-UAV wildfire management scenarios are non-stationary, with spatially clustered dynamically spreading fires, potential pop-up fires, and partial observability due to limited UAV numbers and sensing range. The objective of CREDS is to detect and sequentially mitigate all growing fires as Single-UAV Tasks (SUT), minimizing biodiversity loss through rapid UAV intervention and promoting efficient resource utilization by avoiding complex multi-UAV coordination. CREDS employs a three-phased approach, beginning with fire detection using a search algorithm, followed by local trajectory generation using the auction-based Resource-Efficient Decentralized Sequential planner (REDS), incorporating the novel non-stationary cost function, the Deadline-Prioritized Mitigation Cost (DPMC). Finally, a conflict-aware consensus algorithm resolves conflicts to determine a global trajectory for spatiotemporal mitigation. The performance evaluation of the CREDS for partial and full observability conditions with both heterogeneous and homogeneous UAV teams for different fires-to-UAV ratios demonstrates a $100\%$ success rate for ratios up to $4$ and a high success rate for the critical ratio of $5$, outperforming baselines. Heterogeneous UAV teams outperform homogeneous teams in handling heterogeneous deadlines of SUT mitigation. CREDS exhibits scalability and $100\%$ convergence, demonstrating robustness against potential deadlock assignments, enhancing its success rate compared to the baseline approaches.