 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLM: Removing the GPU Memory Barrier for 3D Gaussian Splatting
Nov 07, 20253D Gaussian Splatting (3DGS) is an increasingly popular novel view synthesis approach due to its fast rendering time, and high-quality output. However, scaling 3DGS to large (or intricate) scenes is challenging due to its large memory requirement, which exceed most GPU's memory capacity. In this paper, we describe CLM, a system that allows 3DGS to render large scenes using a single consumer-grade GPU, e.g., RTX4090. It does so by offloading Gaussians to CPU memory, and loading them into GPU memory only when necessary. To reduce performance and communication overheads, CLM uses a novel offloading strategy that exploits observations about 3DGS's memory access pattern for pipelining, and thus overlap GPU-to-CPU communication, GPU computation and CPU computation. Furthermore, we also exploit observation about the access pattern to reduce communication volume. Our evaluation shows that the resulting implementation can render a large scene that requires 100 million Gaussians on a single RTX4090 and achieve state-of-the-art reconstruction quality.
Multiagent Multitraversal Multimodal Self-Driving: Open MARS Dataset
Jun 13, 2024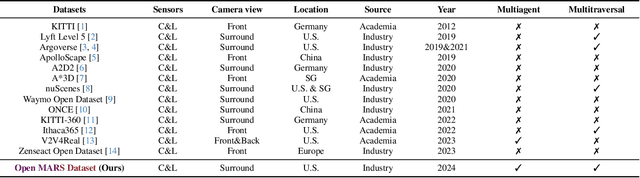
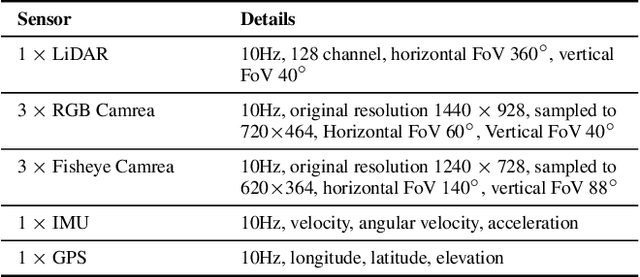
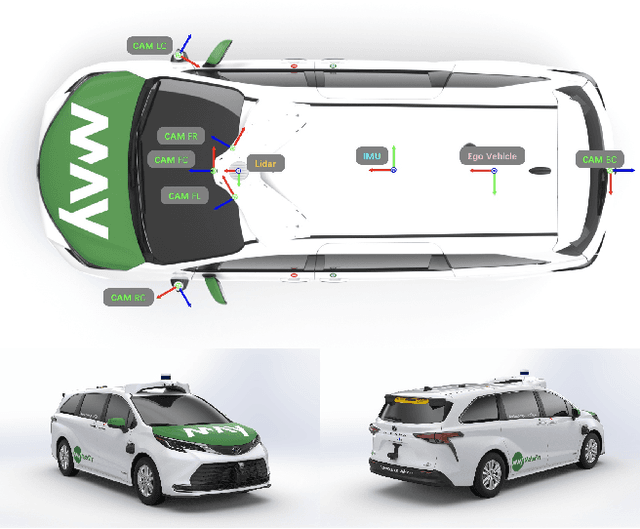
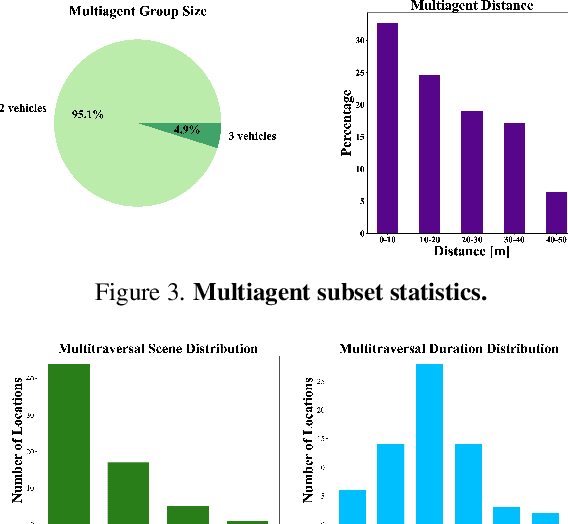
Large-scale datasets have fueled recent advancements in AI-based autonomous vehicle research. However, these datasets are usually collected from a single vehicle's one-time pass of a certain location, lacking multiagent interactions or repeated traversals of the same place. Such information could lead to transformative enhancements in autonomous vehicles' perception, prediction, and planning capabilities. To bridge this gap, in collaboration with the self-driving company May Mobility, we present the MARS dataset which unifies scenarios that enable MultiAgent, multitraveRSal, and multimodal autonomous vehicle research. More specifically, MARS is collected with a fleet of autonomous vehicles driving within a certain geographical area. Each vehicle has its own route and different vehicles may appear at nearby locations. Each vehicle is equipped with a LiDAR and surround-view RGB cameras. We curate two subsets in MARS: one facilitates collaborative driving with multiple vehicles simultaneously present at the same location, and the other enables memory retrospection through asynchronous traversals of the same location by multiple vehicles. We conduct experiments in place recognition and neural reconstruction. More importantly, MARS introduces new research opportunities and challenges such as multitraversal 3D reconstruction, multiagent perception, and unsupervised object discovery. Our data and codes can be found at https://ai4ce.github.io/MARS/.
LiDAR-based 4D Occupancy Completion and Forecasting
Oct 17, 2023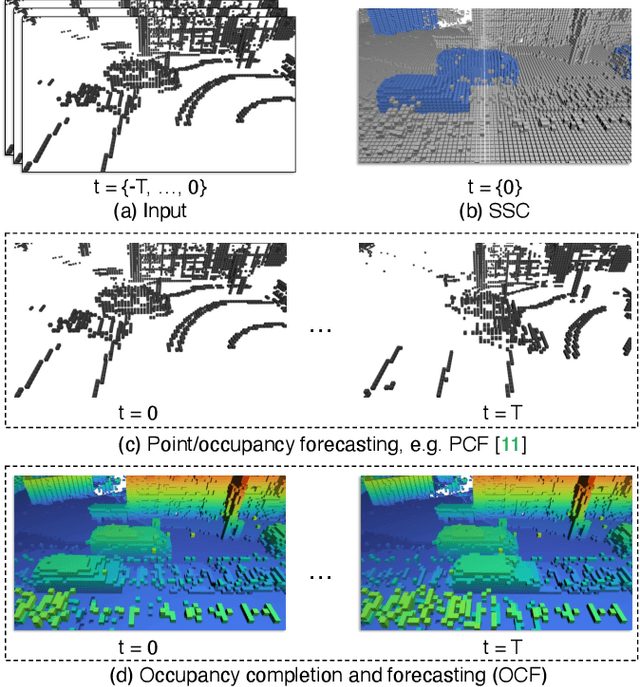
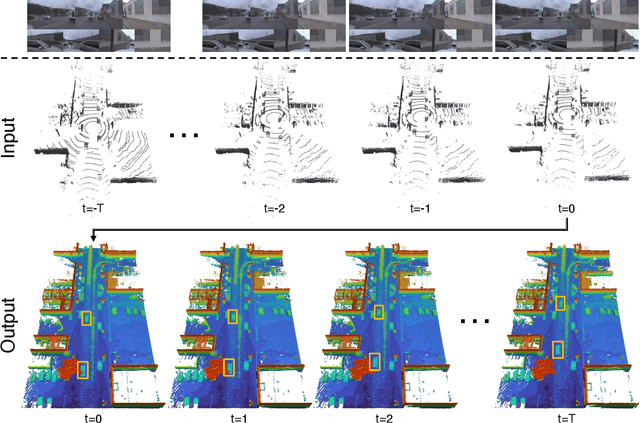
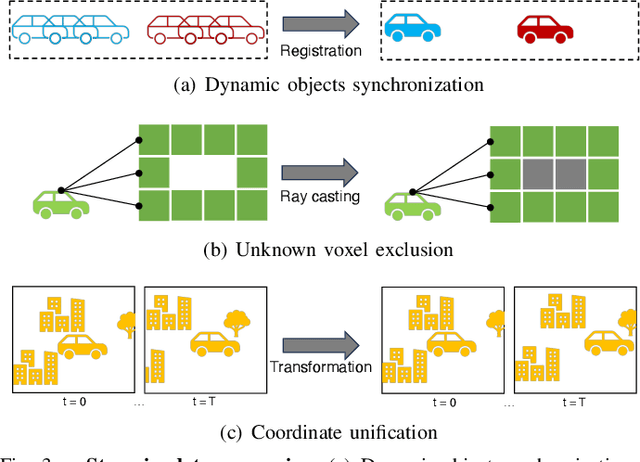
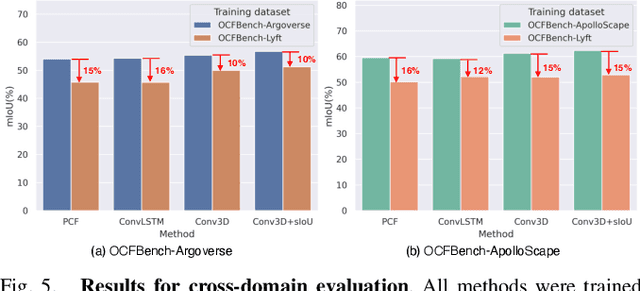
Scene completion and forecasting are two popular perception problems in research for mobile agents like autonomous vehicles. Existing approaches treat the two problems in isolation, resulting in a separate perception of the two aspects. In this paper, we introduce a novel LiDAR perception task of Occupancy Completion and Forecasting (OCF) in the context of autonomous driving to unify these aspects into a cohesive framework. This task requires new algorithms to address three challenges altogether: (1) sparse-to-dense reconstruction, (2) partial-to-complete hallucination, and (3) 3D-to-4D prediction. To enable supervision and evaluation, we curate a large-scale dataset termed OCFBench from public autonomous driving datasets. We analyze the performance of closely related existing baseline models and our own ones on our dataset. We envision that this research will inspire and call for further investigation in this evolving and crucial area of 4D perception. Our code for data curation and baseline implementation is available at https://github.com/ai4ce/Occ4cast.
SSCBench: A Large-Scale 3D Semantic Scene Completion Benchmark for Autonomous Driving
Jun 15, 2023



Semantic scene completion (SSC) is crucial for holistic 3D scene understanding by jointly estimating semantics and geometry from sparse observations. However, progress in SSC, particularly in autonomous driving scenarios, is hindered by the scarcity of high-quality datasets. To overcome this challenge, we introduce SSCBench, a comprehensive benchmark that integrates scenes from widely-used automotive datasets (e.g., KITTI-360, nuScenes, and Waymo). SSCBench follows an established setup and format in the community, facilitating the easy exploration of the camera- and LiDAR-based SSC across various real-world scenarios. We present quantitative and qualitative evaluations of state-of-the-art algorithms on SSCBench and commit to continuously incorporating novel automotive datasets and SSC algorithms to drive further advancements in this field. Our resources are released on https://github.com/ai4ce/SSCBench.