 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMP2026: A Multi-Platform Marine Robotics Dataset for Tracking and Mapping
Mar 04, 2026Marine environments present significant challenges for perception and autonomy due to dynamic surfaces, limited visibility, and complex interactions between aerial, surface, and submerged sensing modalities. This paper introduces the Aerial Marine Perception Dataset (AMP2026), a multi-platform marine robotics dataset collected across multiple field deployments designed to support research in two primary areas: multi-view tracking and marine environment mapping. The dataset includes synchronized data from aerial drones, boat-mounted cameras, and submerged robotic platforms, along with associated localization and telemetry information. The goal of this work is to provide a publicly available dataset enabling research in marine perception and multi-robot observation scenarios. This paper describes the data collection methodology, sensor configurations, dataset organization, and intended research tasks supported by the dataset.
Mapping the Catacombs: An Underwater Cave Segment of the Devil's Eye System
Jul 08, 2025



This paper presents a framework for mapping underwater caves. Underwater caves are crucial for fresh water resource management, underwater archaeology, and hydrogeology. Mapping the cave's outline and dimensions, as well as creating photorealistic 3D maps, is critical for enabling a better understanding of this underwater domain. In this paper, we present the mapping of an underwater cave segment (the catacombs) of the Devil's Eye cave system at Ginnie Springs, FL. We utilized a set of inexpensive action cameras in conjunction with a dive computer to estimate the trajectories of the cameras together with a sparse point cloud. The resulting reconstructions are utilized to produce a one-dimensional retract of the cave passages in the form of the average trajectory together with the boundaries (top, bottom, left, and right). The use of the dive computer enables the observability of the z-dimension in addition to the roll and pitch in a visual/inertial framework (SVIn2). In addition, the keyframes generated by SVIn2 together with the estimated camera poses for select areas are used as input to a global optimization (bundle adjustment) framework -- COLMAP -- in order to produce a dense reconstruction of those areas. The same cave segment is manually surveyed using the MNemo V2 instrument, providing an additional set of measurements validating the proposed approach. It is worth noting that with the use of action cameras, the primary components of a cave map can be constructed. Furthermore, with the utilization of a global optimization framework guided by the results of VI-SLAM package SVIn2, photorealistic dense 3D representations of selected areas can be reconstructed.
Multi-modal Perception Dataset of In-water Objects for Autonomous Surface Vehicles
Apr 29, 2024



This paper introduces the first publicly accessible multi-modal perception dataset for autonomous maritime navigation, focusing on in-water obstacles within the aquatic environment to enhance situational awareness for Autonomous Surface Vehicles (ASVs). This dataset, consisting of diverse objects encountered under varying environmental conditions, aims to bridge the research gap in marine robotics by providing a multi-modal, annotated, and ego-centric perception dataset, for object detection and classification. We also show the applicability of the proposed dataset's framework using deep learning-based open-source perception algorithms that have shown success. We expect that our dataset will contribute to development of the marine autonomy pipeline and marine (field) robotics. Please note this is a work-in-progress paper about our on-going research that we plan to release in full via future publication.
Monocular Camera and Single-Beam Sonar-Based Underwater Collision-Free Navigation with Domain Randomization
Dec 08, 2022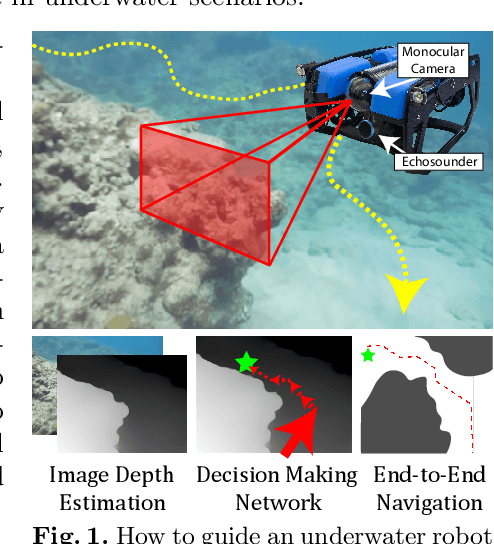

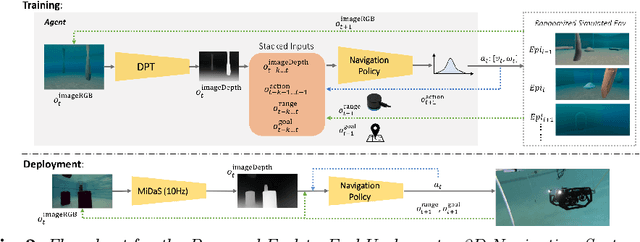
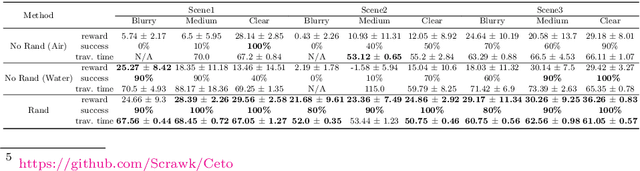
Underwater navigation presents several challenges, including unstructured unknown environments, lack of reliable localization systems (e.g., GPS), and poor visibility. Furthermore, good-quality obstacle detection sensors for underwater robots are scant and costly; and many sensors like RGB-D cameras and LiDAR only work in-air. To enable reliable mapless underwater navigation despite these challenges, we propose a low-cost end-to-end navigation system, based on a monocular camera and a fixed single-beam echo-sounder, that efficiently navigates an underwater robot to waypoints while avoiding nearby obstacles. Our proposed method is based on Proximal Policy Optimization (PPO), which takes as input current relative goal information, estimated depth images, echo-sounder readings, and previous executed actions, and outputs 3D robot actions in a normalized scale. End-to-end training was done in simulation, where we adopted domain randomization (varying underwater conditions and visibility) to learn a robust policy against noise and changes in visibility conditions. The experiments in simulation and real-world demonstrated that our proposed method is successful and resilient in navigating a low-cost underwater robot in unknown underwater environments. The implementation is made publicly available at https://github.com/dartmouthrobotics/deeprl-uw-robot-navigation.
Real-time Model-based Image Color Correction for Underwater Robots
Apr 12, 2019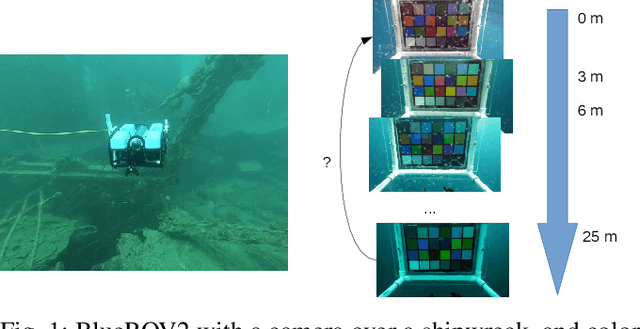
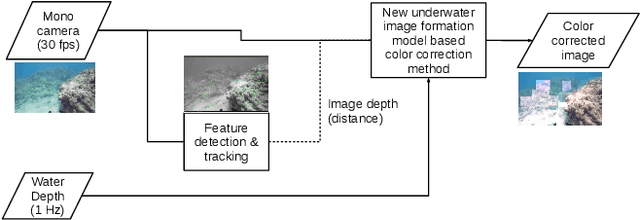
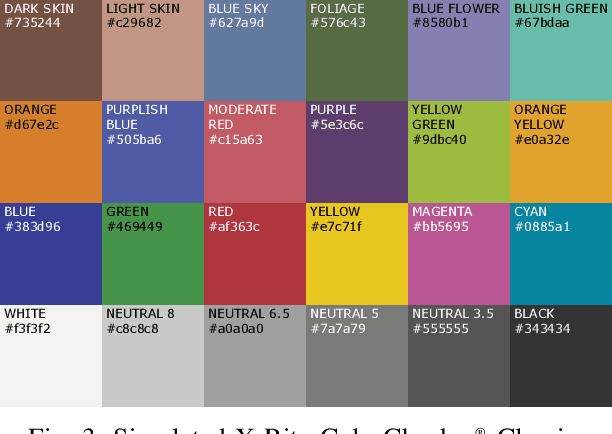
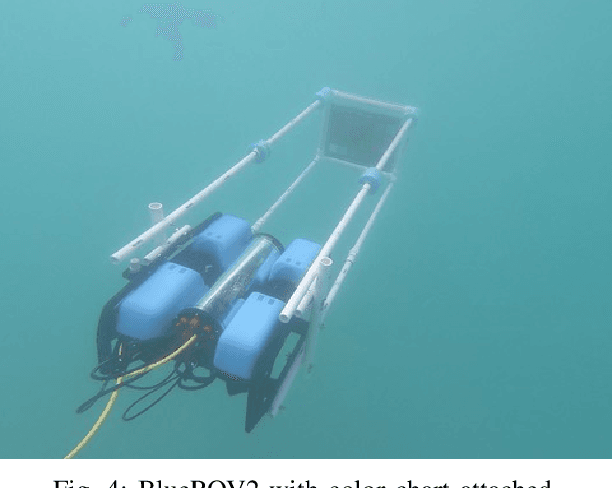
Recently, a new underwater imaging formation model presented that the coefficients related to the direct and backscatter transmission signals are dependent on the type of water, camera specifications, water depth, and imaging range. This paper proposes an underwater color correction method that integrates this new model on an underwater robot, using information from a pressure depth sensor for water depth and a visual odometry system for estimating scene distance. Experiments were performed with and without a color chart over coral reefs and a shipwreck in the Caribbean. We demonstrate the performance of our proposed method by comparing it with other statistic-, physic-, and learning-based color correction methods. Applications for our proposed method include improved 3D reconstruction and more robust underwater robot navigation.