 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotionTeller: Multi-modal Integration of Wearable Time-Series with LLMs for Health and Behavioral Understanding
Dec 25, 2025As wearable sensing becomes increasingly pervasive, a key challenge remains: how can we generate natural language summaries from raw physiological signals such as actigraphy - minute-level movement data collected via accelerometers? In this work, we introduce MotionTeller, a generative framework that natively integrates minute-level wearable activity data with large language models (LLMs). MotionTeller combines a pretrained actigraphy encoder with a lightweight projection module that maps behavioral embeddings into the token space of a frozen decoder-only LLM, enabling free-text, autoregressive generation of daily behavioral summaries. We construct a novel dataset of 54383 (actigraphy, text) pairs derived from real-world NHANES recordings, and train the model using cross-entropy loss with supervision only on the language tokens. MotionTeller achieves high semantic fidelity (BERTScore-F1 = 0.924) and lexical accuracy (ROUGE-1 = 0.722), outperforming prompt-based baselines by 7 percent in ROUGE-1. The average training loss converges to 0.38 by epoch 15, indicating stable optimization. Qualitative analysis confirms that MotionTeller captures circadian structure and behavioral transitions, while PCA plots reveal enhanced cluster alignment in embedding space post-training. Together, these results position MotionTeller as a scalable, interpretable system for transforming wearable sensor data into fluent, human-centered descriptions, introducing new pathways for behavioral monitoring, clinical review, and personalized health interventions.
Is Attention All You Need For Actigraphy? Foundation Models of Wearable Accelerometer Data for Mental Health Research
Nov 26, 2024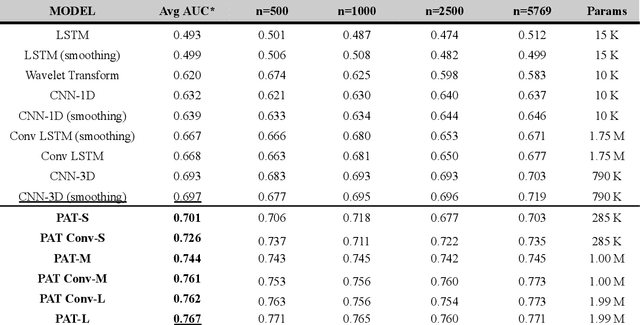
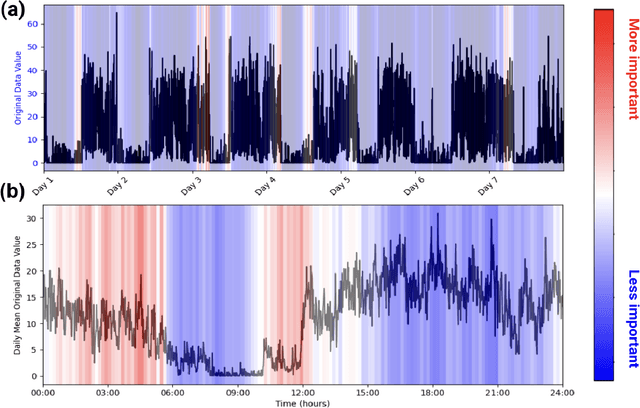
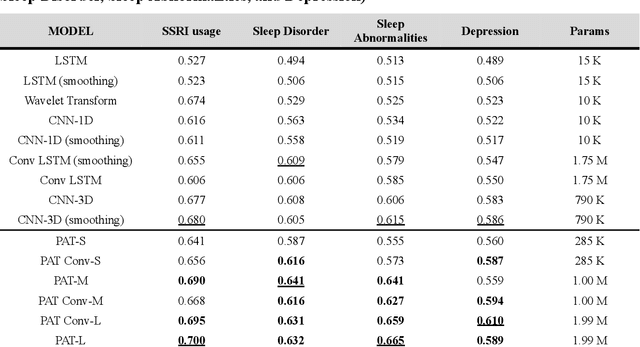
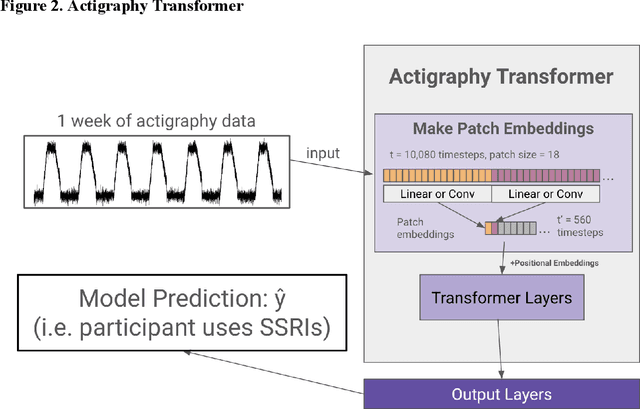
Wearable accelerometry (actigraphy) has provided valuable data for clinical insights since the 1970s and is increasingly important as wearable devices continue to become widespread. The effectiveness of actigraphy in research and clinical contexts is heavily dependent on the modeling architecture utilized. To address this, we developed the Pretrained Actigraphy Transformer (PAT)--the first pretrained and fully attention-based model designed specifically to handle actigraphy. PAT was pretrained on actigraphy from 29,307 participants in NHANES, enabling it to deliver state-of-the-art performance when fine-tuned across various actigraphy prediction tasks in the mental health domain, even in data-limited scenarios. For example, when trained to predict benzodiazepine usage using actigraphy from only 500 labeled participants, PAT achieved an 8.8 percentage-point AUC improvement over the best baseline. With fewer than 2 million parameters and built-in model explainability, PAT is robust yet easy to deploy in health research settings. GitHub: https://github.com/njacobsonlab/Pretrained-Actigraphy-Transformer/
Multi-modal Perception Dataset of In-water Objects for Autonomous Surface Vehicles
Apr 29, 2024



This paper introduces the first publicly accessible multi-modal perception dataset for autonomous maritime navigation, focusing on in-water obstacles within the aquatic environment to enhance situational awareness for Autonomous Surface Vehicles (ASVs). This dataset, consisting of diverse objects encountered under varying environmental conditions, aims to bridge the research gap in marine robotics by providing a multi-modal, annotated, and ego-centric perception dataset, for object detection and classification. We also show the applicability of the proposed dataset's framework using deep learning-based open-source perception algorithms that have shown success. We expect that our dataset will contribute to development of the marine autonomy pipeline and marine (field) robotics. Please note this is a work-in-progress paper about our on-going research that we plan to release in full via future publication.