 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning from Pixels in Environments with Combinatorially Hard Search Spaces
Oct 12, 2021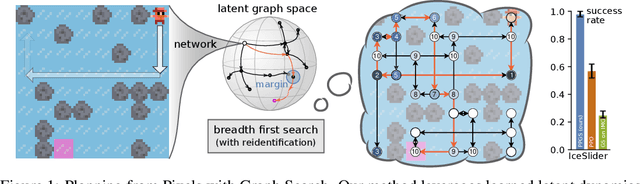
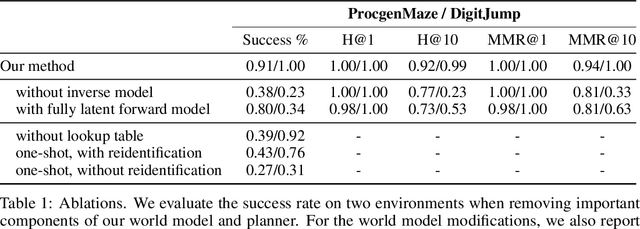
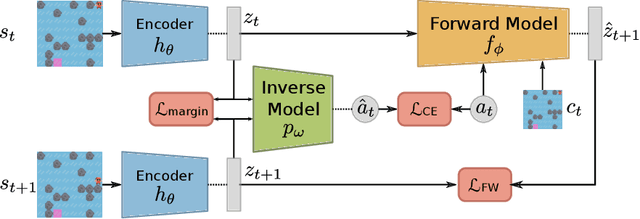
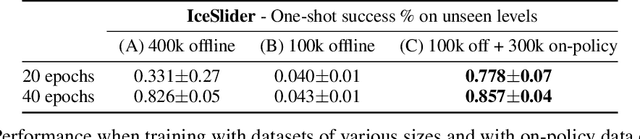
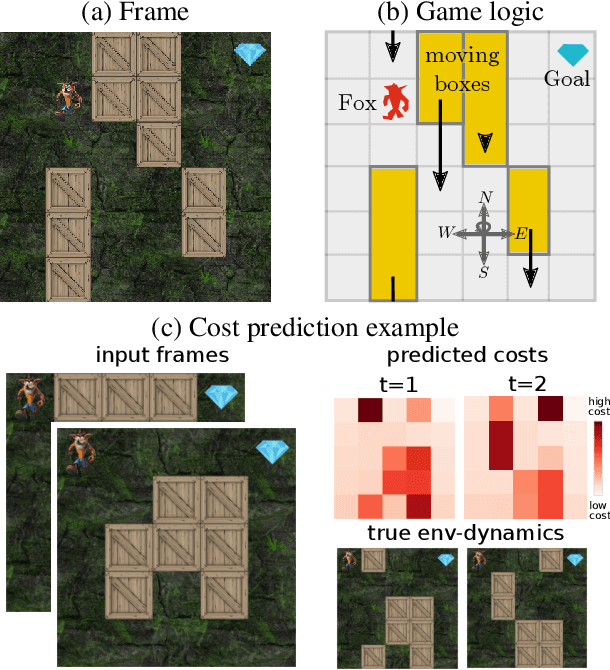
The ability to form complex plans based on raw visual input is a litmus test for current capabilities of artificial intelligence, as it requires a seamless combination of visual processing and abstract algorithmic execution, two traditionally separate areas of computer science. A recent surge of interest in this field brought advances that yield good performance in tasks ranging from arcade games to continuous control; these methods however do not come without significant issues, such as limited generalization capabilities and difficulties when dealing with combinatorially hard planning instances. Our contribution is two-fold: (i) we present a method that learns to represent its environment as a latent graph and leverages state reidentification to reduce the complexity of finding a good policy from exponential to linear (ii) we introduce a set of lightweight environments with an underlying discrete combinatorial structure in which planning is challenging even for humans. Moreover, we show that our methods achieves strong empirical generalization to variations in the environment, even across highly disadvantaged regimes, such as "one-shot" planning, or in an offline RL paradigm which only provides low-quality trajectories.
CombOptNet: Fit the Right NP-Hard Problem by Learning Integer Programming Constraints
May 05, 2021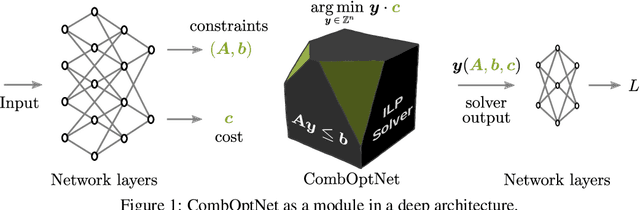
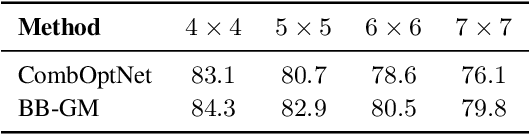
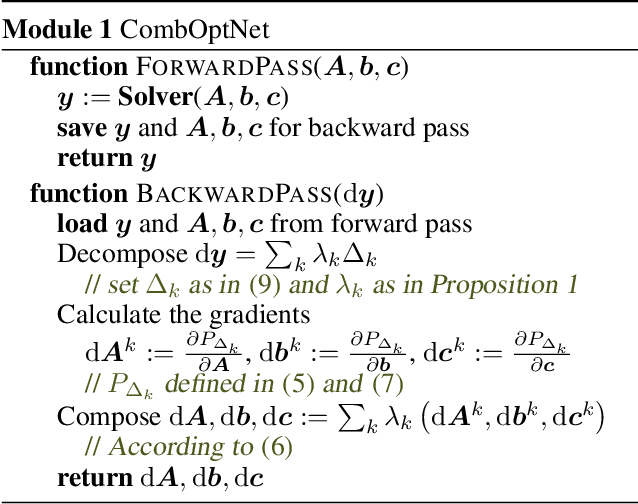
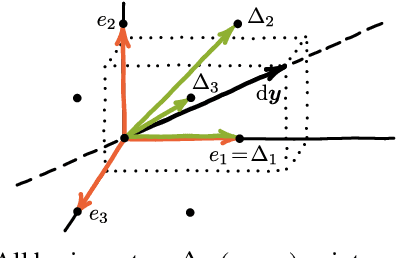
Bridging logical and algorithmic reasoning with modern machine learning techniques is a fundamental challenge with potentially transformative impact. On the algorithmic side, many NP-hard problems can be expressed as integer programs, in which the constraints play the role of their "combinatorial specification". In this work, we aim to integrate integer programming solvers into neural network architectures as layers capable of learning both the cost terms and the constraints. The resulting end-to-end trainable architectures jointly extract features from raw data and solve a suitable (learned) combinatorial problem with state-of-the-art integer programming solvers. We demonstrate the potential of such layers with an extensive performance analysis on synthetic data and with a demonstration on a competitive computer vision keypoint matching benchmark.
Neuro-algorithmic Policies enable Fast Combinatorial Generalization
Feb 15, 2021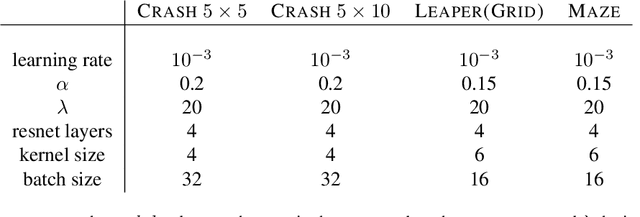


Although model-based and model-free approaches to learning the control of systems have achieved impressive results on standard benchmarks, generalization to task variations is still lacking. Recent results suggest that generalization for standard architectures improves only after obtaining exhaustive amounts of data. We give evidence that generalization capabilities are in many cases bottlenecked by the inability to generalize on the combinatorial aspects of the problem. Furthermore, we show that for a certain subclass of the MDP framework, this can be alleviated by neuro-algorithmic architectures. Many control problems require long-term planning that is hard to solve generically with neural networks alone. We introduce a neuro-algorithmic policy architecture consisting of a neural network and an embedded time-dependent shortest path solver. These policies can be trained end-to-end by blackbox differentiation. We show that this type of architecture generalizes well to unseen variations in the environment already after seeing a few examples.
Deep Graph Matching via Blackbox Differentiation of Combinatorial Solvers
Mar 25, 2020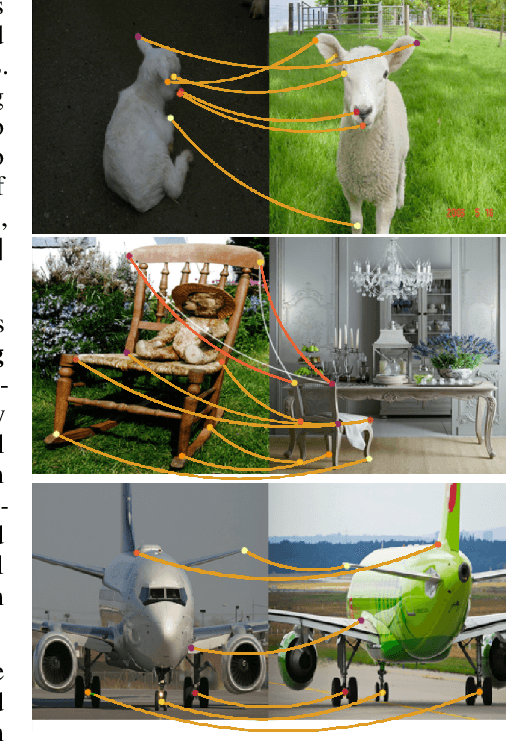

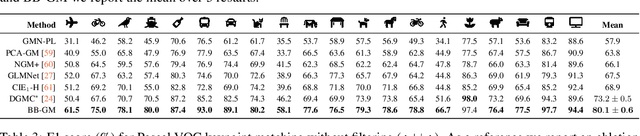
Building on recent progress at the intersection of combinatorial optimization and deep learning, we propose an end-to-end trainable architecture for deep graph matching that contains unmodified combinatorial solvers. Using the presence of heavily optimized combinatorial solvers together with some improvements in architecture design, we advance state-of-the-art on deep graph matching benchmarks for keypoint correspondence. In addition, we highlight the conceptual advantages of incorporating solvers into deep learning architectures, such as the possibility of post-processing with a strong multi-graph matching solver or the indifference to changes in the training setting. Finally, we propose two new challenging experimental setups.
Optimizing Rank-based Metrics with Blackbox Differentiation
Dec 07, 2019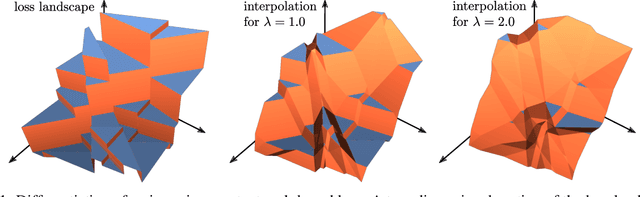
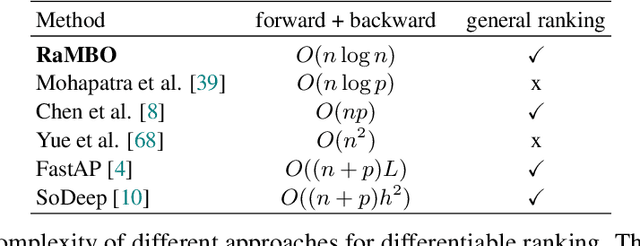
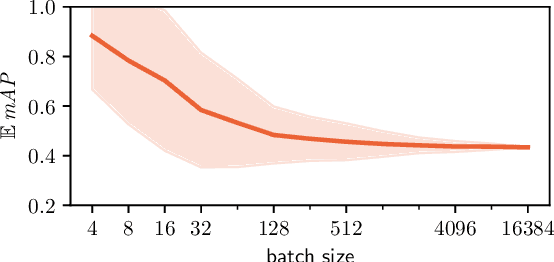
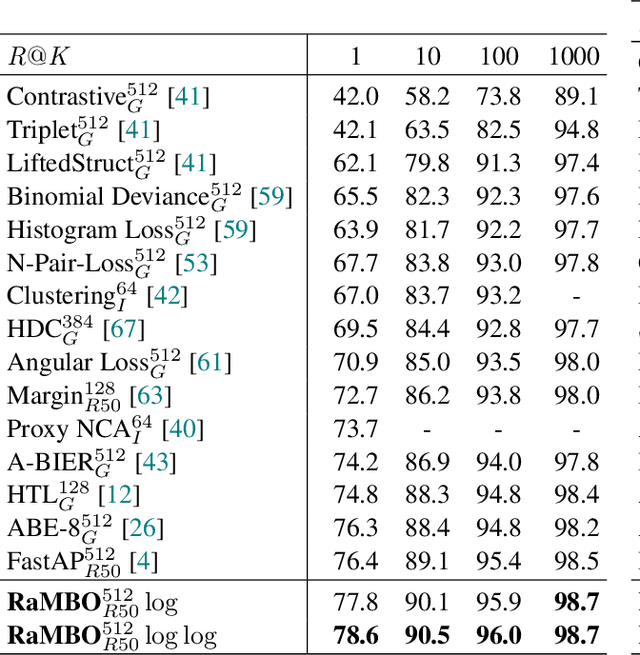
Rank-based metrics are some of the most widely used criteria for performance evaluation of computer vision models. Despite years of effort, direct optimization for these metrics remains a challenge due to their non-differentiable and non-decomposable nature. We present an efficient, theoretically sound, and general method for differentiating rank-based metrics with mini-batch gradient descent. In addition, we address optimization instability and sparsity of the supervision signal that both arise from using rank-based metrics as optimization targets. Resulting losses based on recall and Average Precision are applied to image retrieval and object detection tasks. We obtain performance that is competitive with state-of-the-art on standard image retrieval datasets and consistently improve performance of near state-of-the-art object detectors.
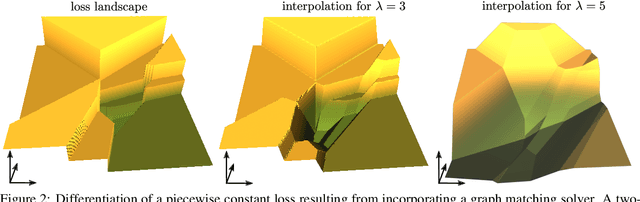
Differentiation of Blackbox Combinatorial Solvers
Dec 04, 2019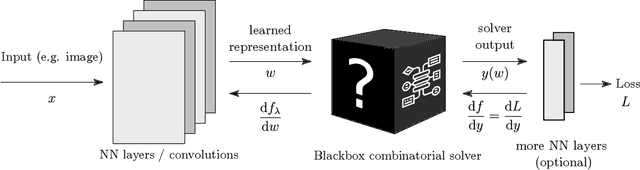

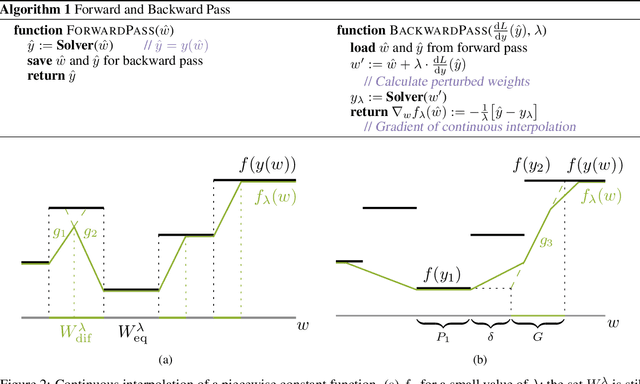
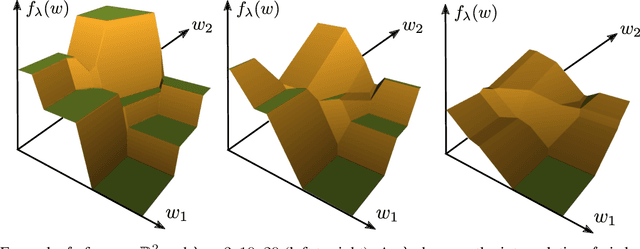
Achieving fusion of deep learning with combinatorial algorithms promises transformative changes to artificial intelligence. One possible approach is to introduce combinatorial building blocks into neural networks. Such end-to-end architectures have the potential to tackle combinatorial problems on raw input data such as ensuring global consistency in multi-object tracking or route planning on maps in robotics. In this work, we present a method that implements an efficient backward pass through blackbox implementations of combinatorial solvers with linear objective functions. We provide both theoretical and experimental backing. In particular, we incorporate the Gurobi MIP solver, Blossom V algorithm, and Dijkstra's algorithm into architectures that extract suitable features from raw inputs for the traveling salesman problem, the min-cost perfect matching problem and the shortest path problem.