 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning from Pixels in Environments with Combinatorially Hard Search Spaces
Paper and Code
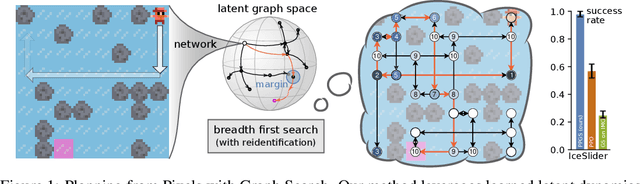
The ability to form complex plans based on raw visual input is a litmus test for current capabilities of artificial intelligence, as it requires a seamless combination of visual processing and abstract algorithmic execution, two traditionally separate areas of computer science. A recent surge of interest in this field brought advances that yield good performance in tasks ranging from arcade games to continuous control; these methods however do not come without significant issues, such as limited generalization capabilities and difficulties when dealing with combinatorially hard planning instances. Our contribution is two-fold: (i) we present a method that learns to represent its environment as a latent graph and leverages state reidentification to reduce the complexity of finding a good policy from exponential to linear (ii) we introduce a set of lightweight environments with an underlying discrete combinatorial structure in which planning is challenging even for humans. Moreover, we show that our methods achieves strong empirical generalization to variations in the environment, even across highly disadvantaged regimes, such as "one-shot" planning, or in an offline RL paradigm which only provides low-quality trajectories.