 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantitative Outcome-Oriented Assessment of Microsurgical Anastomosis
Aug 26, 2025



Microsurgical anastomosis demands exceptional dexterity and visuospatial skills, underscoring the importance of comprehensive training and precise outcome assessment. Currently, methods such as the outcome-oriented anastomosis lapse index are used to evaluate this procedure. However, they often rely on subjective judgment, which can introduce biases that affect the reliability and efficiency of the assessment of competence. Leveraging three datasets from hospitals with participants at various levels, we introduce a quantitative framework that uses image-processing techniques for objective assessment of microsurgical anastomoses. The approach uses geometric modeling of errors along with a detection and scoring mechanism, enhancing the efficiency and reliability of microsurgical proficiency assessment and advancing training protocols. The results show that the geometric metrics effectively replicate expert raters' scoring for the errors considered in this work.
Efficient Robot Skill Learning with Imitation from a Single Video for Contact-Rich Fabric Manipulation
Apr 24, 2023



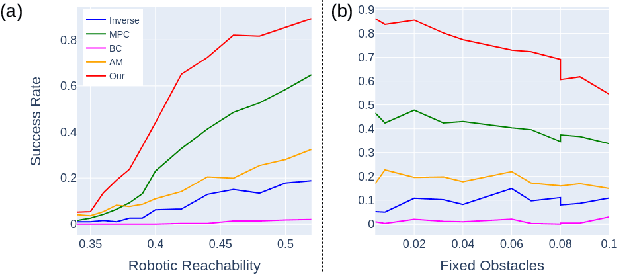
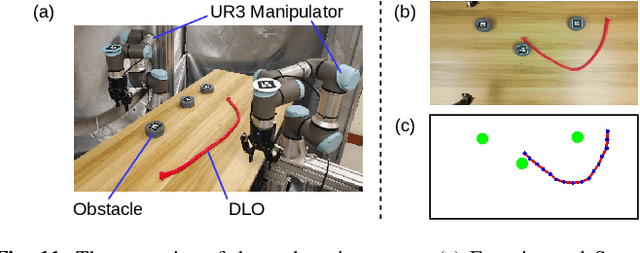
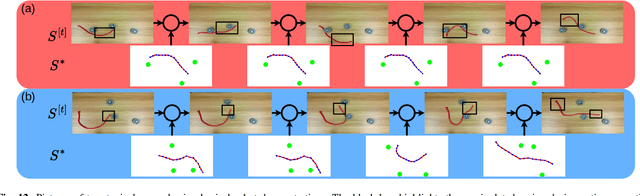
Classical policy search algorithms for robotics typically require performing extensive explorations, which are time-consuming and expensive to implement with real physical platforms. To facilitate the efficient learning of robot manipulation skills, in this work, we propose a new approach comprised of three modules: (1) learning of general prior knowledge with random explorations in simulation, including state representations, dynamic models, and the constrained action space of the task; (2) extraction of a state alignment-based reward function from a single demonstration video; (3) real-time optimization of the imitation policy under systematic safety constraints with sampling-based model predictive control. This solution results in an efficient one-shot imitation-from-video strategy that simplifies the learning and execution of robot skills in real applications. Specifically, we learn priors in a scene of a task family and then deploy the policy in a novel scene immediately following a single demonstration, preventing time-consuming and risky explorations in the environment. As we do not make a strong assumption of dynamic consistency between the scenes, learning priors can be conducted in simulation to avoid collecting data in real-world circumstances. We evaluate the effectiveness of our approach in the context of contact-rich fabric manipulation, which is a common scenario in industrial and domestic tasks. Detailed numerical simulations and real-world hardware experiments reveal that our method can achieve rapid skill acquisition for challenging manipulation tasks.
A Dual-Arm Collaborative Framework for Dexterous Manipulation in Unstructured Environments with Contrastive Planning
Sep 13, 2022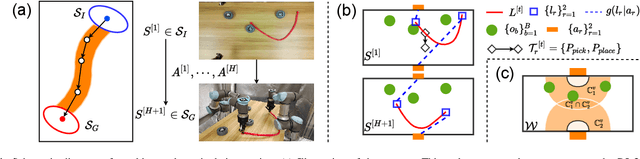
Most object manipulation strategies for robots are based on the assumption that the object is rigid (i.e., with fixed geometry) and the goal's details have been fully specified (e.g., the exact target pose). However, there are many tasks that involve spatial relations in human environments where these conditions may be hard to satisfy, e.g., bending and placing a cable inside an unknown container. To develop advanced robotic manipulation capabilities in unstructured environments that avoid these assumptions, we propose a novel long-horizon framework that exploits contrastive planning in finding promising collaborative actions. Using simulation data collected by random actions, we learn an embedding model in a contrastive manner that encodes the spatio-temporal information from successful experiences, which facilitates the subgoal planning through clustering in the latent space. Based on the keypoint correspondence-based action parameterization, we design a leader-follower control scheme for the collaboration between dual arms. All models of our policy are automatically trained in simulation and can be directly transferred to real-world environments. To validate the proposed framework, we conduct a detailed experimental study on a complex scenario subject to environmental and reachability constraints in both simulation and real environments.
Towards a Multispectral RGB-IR-UV-D Vision System -- Seeing the Invisible in 3D
Aug 19, 2021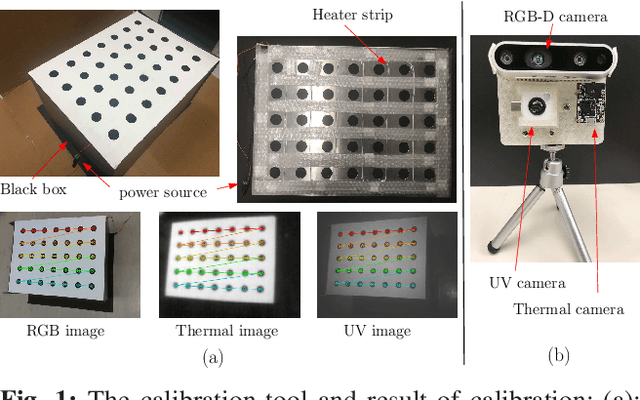
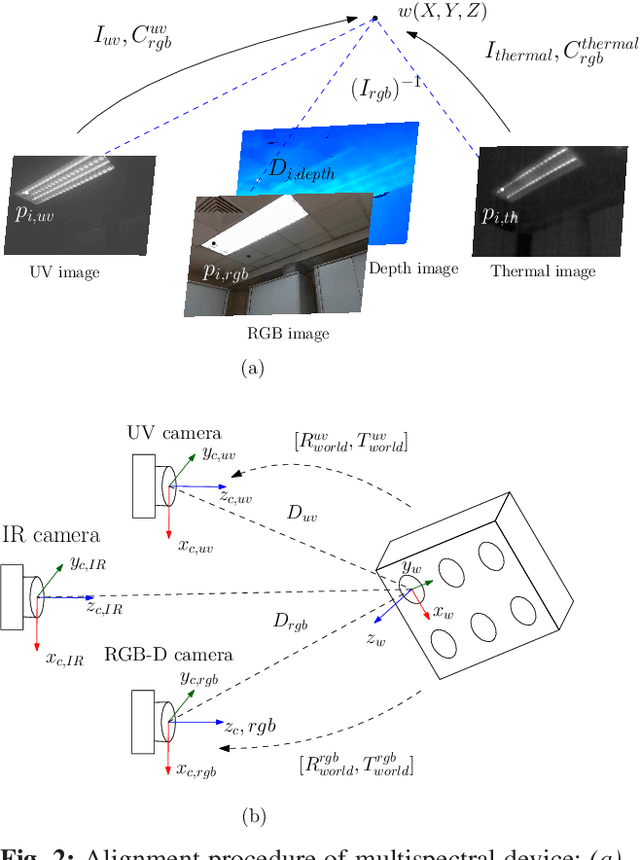
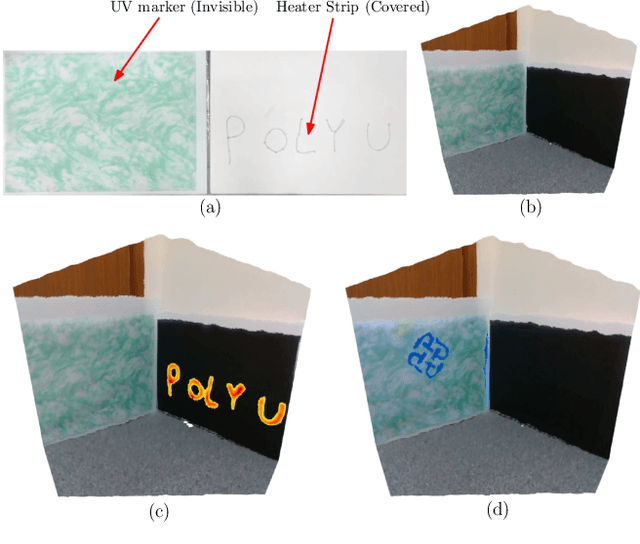
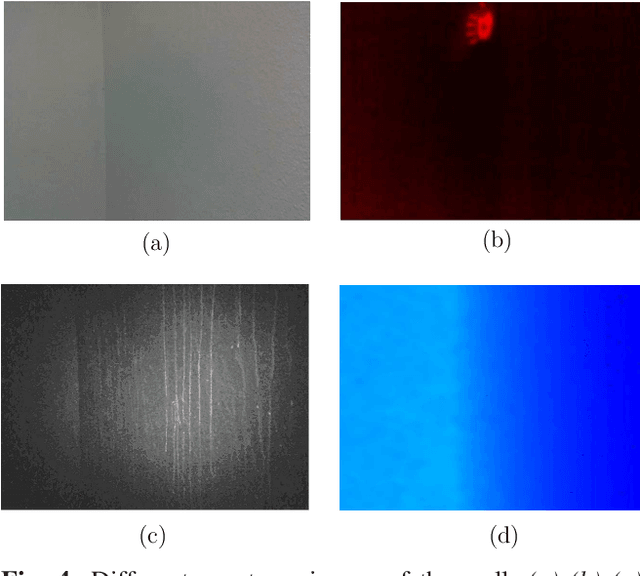
In this paper, we present the development of a sensing system with the capability to compute multispectral point clouds in real-time. The proposed multi-eye sensor system effectively registers information from the visible, (long-wave) infrared, and ultraviolet spectrum to its depth sensing frame, thus enabling to measure a wider range of surface features that are otherwise hidden to the naked eye. For that, we designed a new cross-calibration apparatus that produces consistent features which can be sensed by each of the cameras, therefore, acting as a multispectral "chessboard". The performance of the sensor is evaluated with two different cases of studies, where we show that the proposed system can detect "hidden" features of a 3D environment.
On Radiation-Based Thermal Servoing: New Models, Controls and Experiments
Dec 24, 2020
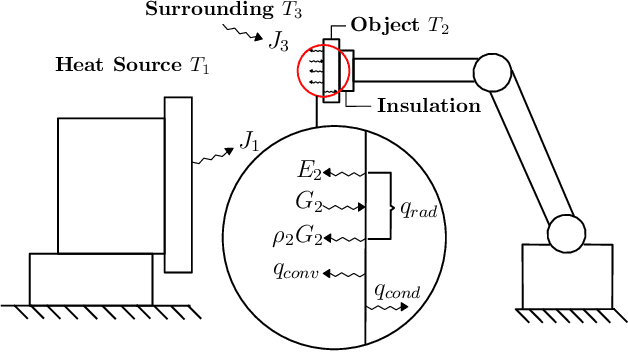
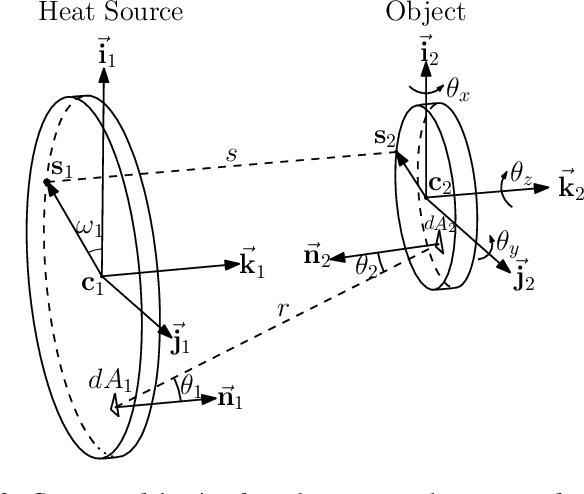
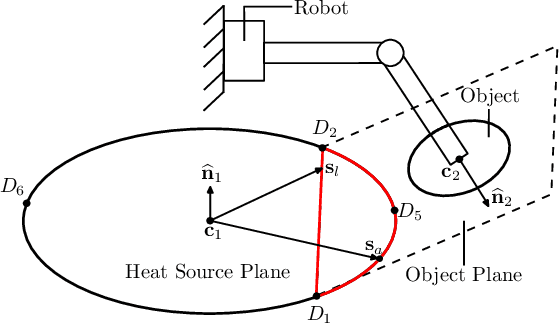
In this paper, we introduce a new sensor-based control method that regulates (by means of robot motions) the heat transfer between a radiative source and an object of interest. This valuable sensorimotor capability is needed in many industrial, dermatology and field robot applications, and it is an essential component for creating machines with advanced thermo-motor intelligence. To this end, we derive a geometric-thermal-motor model which describes the relationship between the robot's active configuration and the produced dynamic thermal response. We then use the model to guide the design of two new thermal servoing controllers (one model-based and one adaptive), and analyze their stability with Lyapunov theory. To validate our method, we report a detailed experimental study with a robotic manipulator conducting autonomous thermal servoing tasks. To the best of the authors' knowledge, this is the first time that temperature regulation has been formulated as a motion control problem for robots.
Robotics Meets Cosmetic Dermatology: Development of a Novel Vision-Guided System for Skin Photo-Rejuvenation
May 22, 2020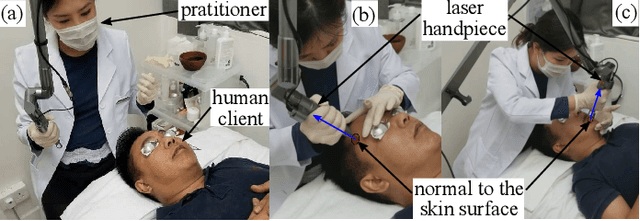
In this paper, we present a novel robotic system for skin photo-rejuvenation procedures, which can uniformly deliver the laser's energy over the skin of the face. The robotised procedure is performed by a manipulator whose end-effector is instrumented with a depth sensor, a thermal camera, and a cosmetic laser generator. To plan the heat stimulating trajectories for the laser, the system computes the surface model of the face and segments it into seven regions that are automatically filled with laser shots. We report experimental results with human subjects to validate the performance of the system. To the best of the author's knowledge, this is the first time that facial skin rejuvenation has been automated by robot manipulators.