 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePSO-Based Optimal Coverage Path Planning for Surface Defect Inspection of 3C Components with a Robotic Line Scanner
Jul 10, 2023The automatic inspection of surface defects is an important task for quality control in the computers, communications, and consumer electronics (3C) industry. Conventional devices for defect inspection (viz. line-scan sensors) have a limited field of view, thus, a robot-aided defect inspection system needs to scan the object from multiple viewpoints. Optimally selecting the robot's viewpoints and planning a path is regarded as coverage path planning (CPP), a problem that enables inspecting the object's complete surface while reducing the scanning time and avoiding misdetection of defects. However, the development of CPP strategies for robotic line scanners has not been sufficiently studied by researchers. To fill this gap in the literature, in this paper, we present a new approach for robotic line scanners to detect surface defects of 3C free-form objects automatically. Our proposed solution consists of generating a local path by a new hybrid region segmentation method and an adaptive planning algorithm to ensure the coverage of the complete object surface. An optimization method for the global path sequence is developed to maximize the scanning efficiency. To verify our proposed methodology, we conduct detailed simulation-based and experimental studies on various free-form workpieces, and compare its performance with a state-of-the-art solution. The reported results demonstrate the feasibility and effectiveness of our approach.
A Split-face Study of Novel Robotic Prototype vs Human Operator in Skin Rejuvenation Using Q-switched Nd:Yag Laser: Accuracy, Efficacy and Safety
Jun 05, 2021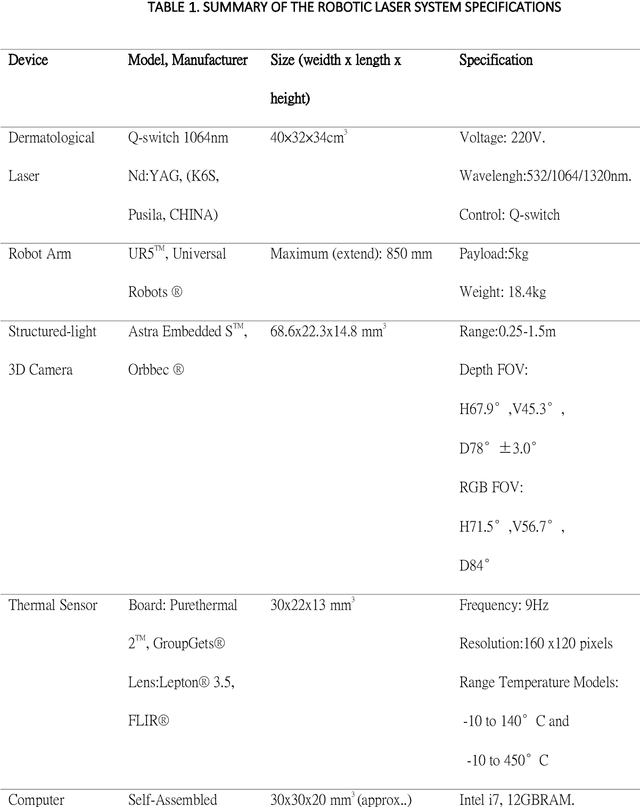
Background: Robotic technologies involved in skin laser are emerging. Objective: To compare the accuracy, efficacy and safety of novel robotic prototype with human operator in laser operation performance for skin photo-rejuvenation. Methods: Seventeen subjects were enrolled in a prospective, comparative split-face trial. Q-switch 1064nm laser conducted by the robotic prototype was provided on the right side of the face and that by the professional practitioner on the left. Each subject underwent a single time, one-pass, non-overlapped treatment on an equal size area of the forehead and cheek. Objective assessments included: treatment duration, laser irradiation shots, laser coverage percentage, VISIA parameters, skin temperature and the VAS pain scale. Results: Average time taken by robotic manipulator was longer than human operator; the average number of irradiation shots of both sides had no significant differences. Laser coverage rate of robotic manipulator (60.2 +-15.1%) was greater than that of human operator (43.6 +-12.9%). The VISIA parameters showed no significant differences between robotic manipulator and human operator. No short or long-term side effects were observed with maximum VAS score of 1 point. Limitations: Only one section of laser treatment was performed. Conclusion: Laser operation by novel robotic prototype is more reliable, stable and accurate than human operation.
Robotics Meets Cosmetic Dermatology: Development of a Novel Vision-Guided System for Skin Photo-Rejuvenation
May 22, 2020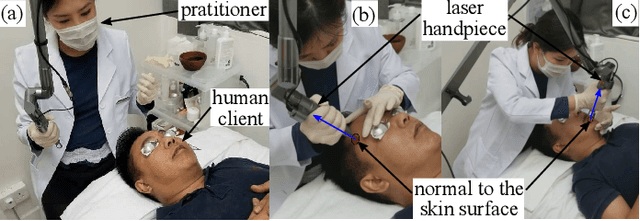
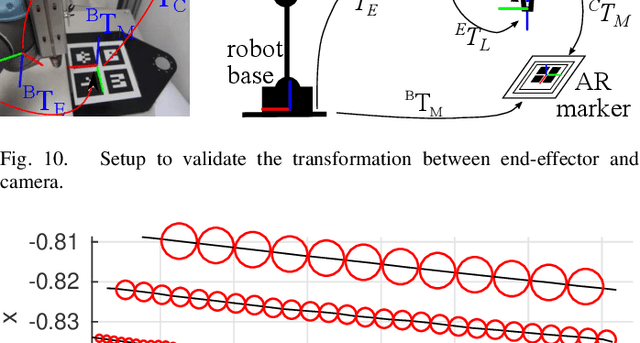
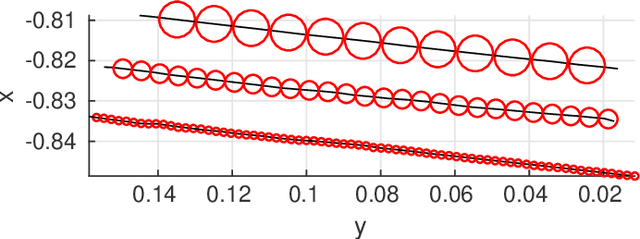
In this paper, we present a novel robotic system for skin photo-rejuvenation procedures, which can uniformly deliver the laser's energy over the skin of the face. The robotised procedure is performed by a manipulator whose end-effector is instrumented with a depth sensor, a thermal camera, and a cosmetic laser generator. To plan the heat stimulating trajectories for the laser, the system computes the surface model of the face and segments it into seven regions that are automatically filled with laser shots. We report experimental results with human subjects to validate the performance of the system. To the best of the author's knowledge, this is the first time that facial skin rejuvenation has been automated by robot manipulators.