 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Assessments of Light-Duty Gasoline Vehicle Emissions Using On-Road Remote Sensing and Machine Learning
Oct 01, 2021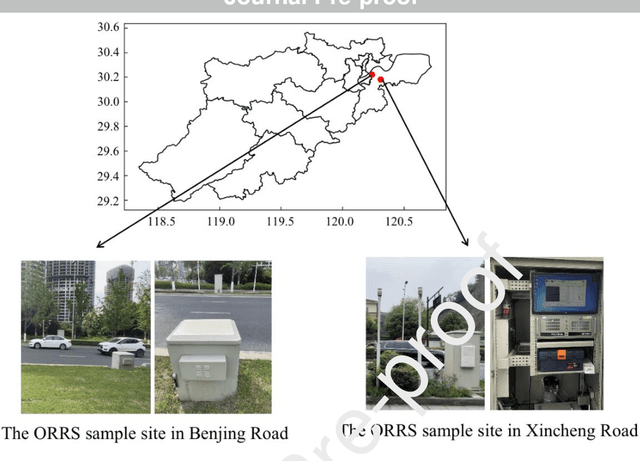
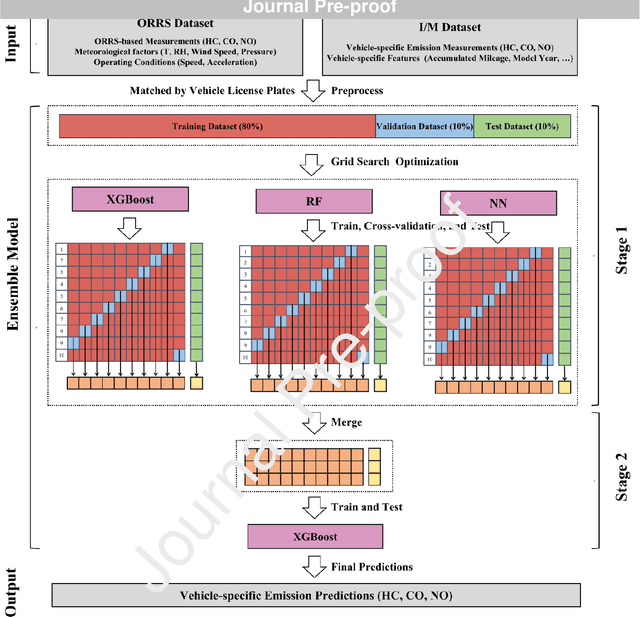
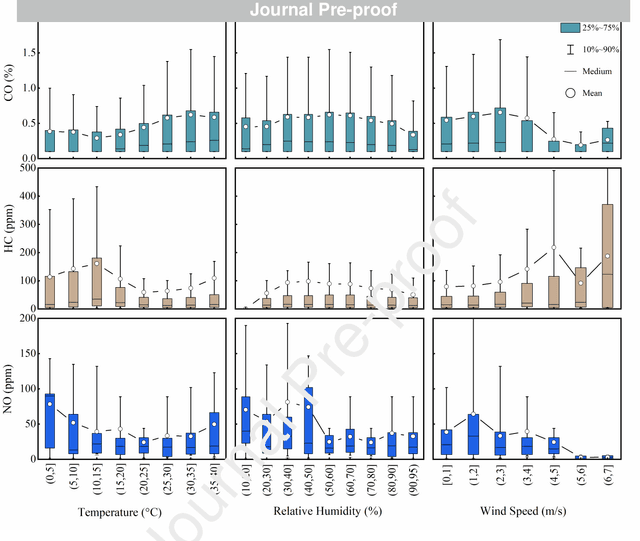
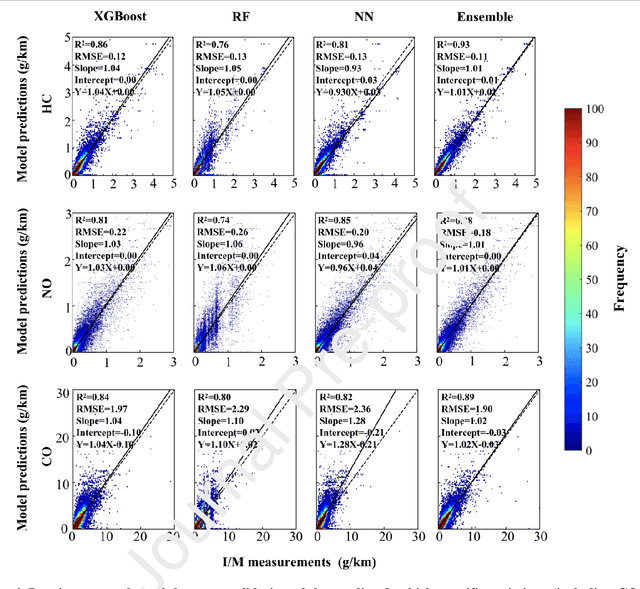
In-time and accurate assessments of on-road vehicle emissions play a central role in urban air quality and health policymaking. However, official insight is hampered by the Inspection/Maintenance (I/M) procedure conducted in the laboratory annually. It not only has a large gap to real-world situations (e.g., meteorological conditions) but also is incapable of regular supervision. Here we build a unique dataset including 103831 light-duty gasoline vehicles, in which on-road remote sensing (ORRS) measurements are linked to the I/M records based on the vehicle identification numbers and license plates. On this basis, we develop an ensemble model framework that integrates three machining learning algorithms, including neural network (NN), extreme gradient boosting (XGBoost), and random forest (RF). We demonstrate that this ensemble model could rapidly assess the vehicle-specific emissions (i.e., CO, HC, and NO). In particular, the model performs quite well for the passing vehicles under normal conditions (i.e., lower VSP (< 18 kw/t), temperature (6 ~ 32 {\deg}C), relative humidity (< 80%), and wind speed (< 5m/s)). Together with the current emission standard, we identify a large number of the dirty (2.33%) or clean (74.92%) vehicles in the real world. Our results show that the ORRS measurements, assisted by the machine-learning-based ensemble model developed here, can realize day-to-day supervision of on-road vehicle-specific emissions. This approach framework provides a valuable opportunity to reform the I/M procedures globally and mitigate urban air pollution deeply.
On Radiation-Based Thermal Servoing: New Models, Controls and Experiments
Dec 24, 2020
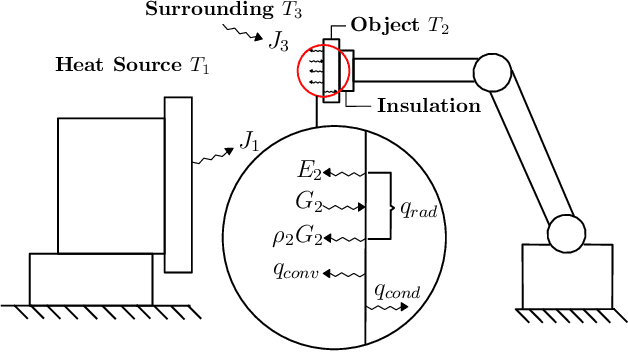
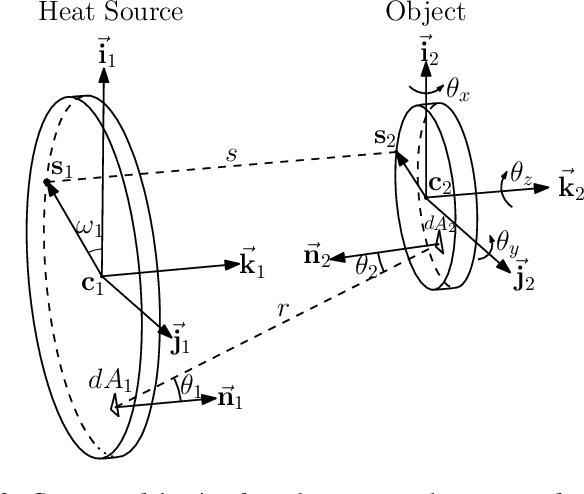
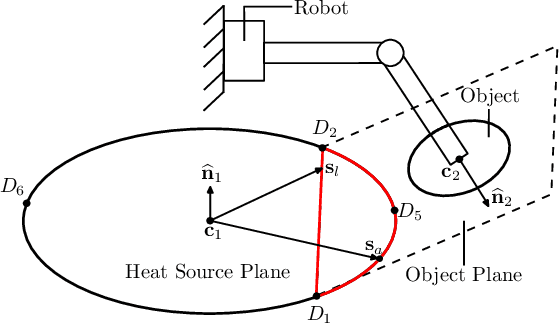
In this paper, we introduce a new sensor-based control method that regulates (by means of robot motions) the heat transfer between a radiative source and an object of interest. This valuable sensorimotor capability is needed in many industrial, dermatology and field robot applications, and it is an essential component for creating machines with advanced thermo-motor intelligence. To this end, we derive a geometric-thermal-motor model which describes the relationship between the robot's active configuration and the produced dynamic thermal response. We then use the model to guide the design of two new thermal servoing controllers (one model-based and one adaptive), and analyze their stability with Lyapunov theory. To validate our method, we report a detailed experimental study with a robotic manipulator conducting autonomous thermal servoing tasks. To the best of the authors' knowledge, this is the first time that temperature regulation has been formulated as a motion control problem for robots.