 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Multispectral RGB-IR-UV-D Vision System -- Seeing the Invisible in 3D
Paper and Code
Aug 19, 2021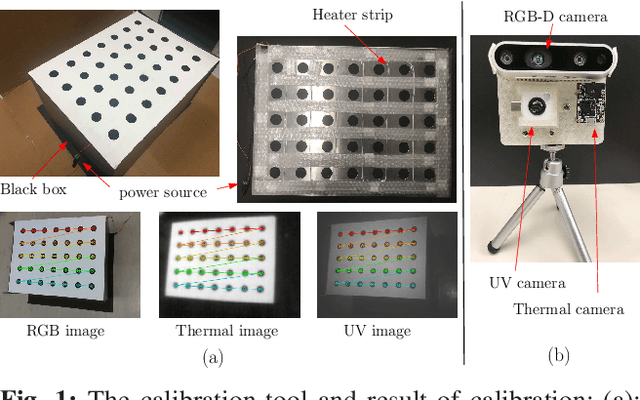
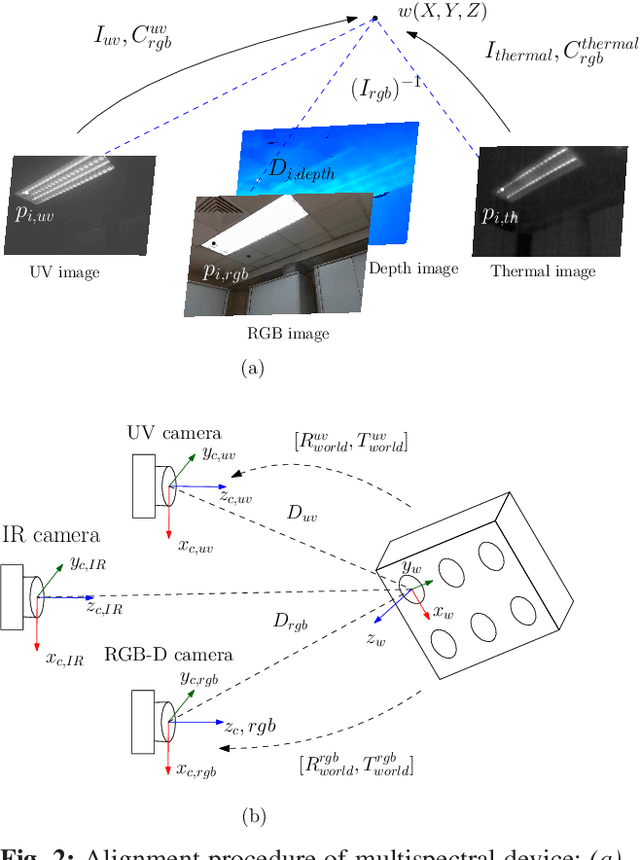
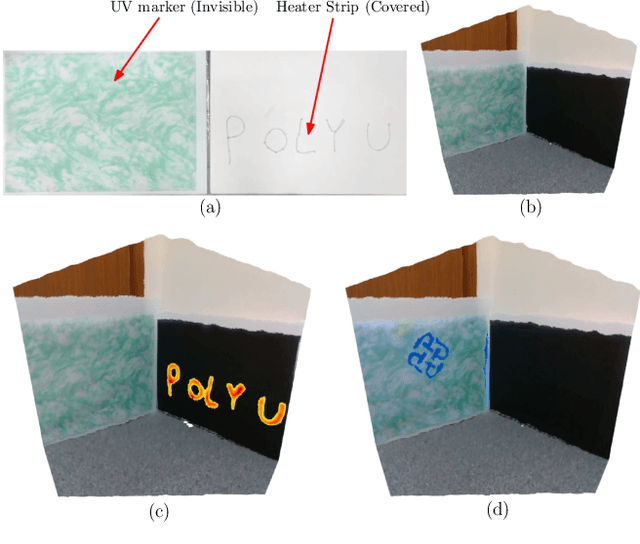
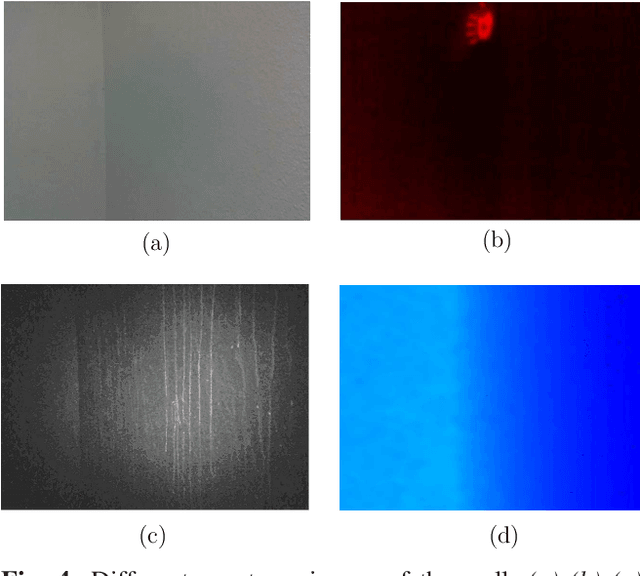
In this paper, we present the development of a sensing system with the capability to compute multispectral point clouds in real-time. The proposed multi-eye sensor system effectively registers information from the visible, (long-wave) infrared, and ultraviolet spectrum to its depth sensing frame, thus enabling to measure a wider range of surface features that are otherwise hidden to the naked eye. For that, we designed a new cross-calibration apparatus that produces consistent features which can be sensed by each of the cameras, therefore, acting as a multispectral "chessboard". The performance of the sensor is evaluated with two different cases of studies, where we show that the proposed system can detect "hidden" features of a 3D environment.