 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Image-based Pest Detection on a Heterogeneous Multi-core Microcontroller
Aug 29, 2024

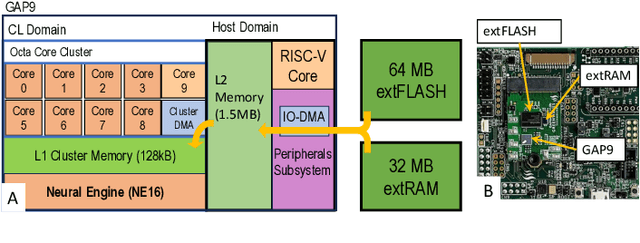

The codling moth pest poses a significant threat to global crop production, with potential losses of up to 80% in apple orchards. Special camera-based sensor nodes are deployed in the field to record and transmit images of trapped insects to monitor the presence of the pest. This paper investigates the embedding of computer vision algorithms in the sensor node using a novel State-of-the-Art Microcontroller Unit (MCU), the GreenWaves Technologies' GAP9 System-on-Chip, which combines 10 RISC-V general purposes cores with a convolution hardware accelerator. We compare the performance of a lightweight Viola-Jones detector algorithm with a Convolutional Neural Network (CNN), MobileNetV3-SSDLite, trained for the pest detection task. On two datasets that differentiate for the distance between the camera sensor and the pest targets, the CNN generalizes better than the other method and achieves a detection accuracy between 83% and 72%. Thanks to the GAP9's CNN accelerator, the CNN inference task takes only 147 ms to process a 320$\times$240 image. Compared to the GAP8 MCU, which only relies on general-purpose cores for processing, we achieved 9.5$\times$ faster inference speed. When running on a 1000 mAh battery at 3.7 V, the estimated lifetime is approximately 199 days, processing an image every 30 seconds. Our study demonstrates that the novel heterogeneous MCU can perform end-to-end CNN inference with an energy consumption of just 4.85 mJ, matching the efficiency of the simpler Viola-Jones algorithm and offering power consumption up to 15$\times$ lower than previous methods. Code at: https://github.com/Bomps4/TAFE_Pest_Detection
Deeploy: Enabling Energy-Efficient Deployment of Small Language Models On Heterogeneous Microcontrollers
Aug 08, 2024



With the rise of Embodied Foundation Models (EFMs), most notably Small Language Models (SLMs), adapting Transformers for edge applications has become a very active field of research. However, achieving end-to-end deployment of SLMs on microcontroller (MCU)-class chips without high-bandwidth off-chip main memory access is still an open challenge. In this paper, we demonstrate high-efficiency end-to-end SLM deployment on a multicore RISC-V (RV32) MCU augmented with ML instruction extensions and a hardware neural processing unit (NPU). To automate the exploration of the constrained, multi-dimensional memory vs. computation tradeoffs involved in aggressive SLM deployment on heterogeneous (multicore+NPU) resources, we introduce Deeploy, a novel Deep Neural Network (DNN) compiler, which generates highly-optimized C code requiring minimal runtime support. We demonstrate that Deeploy generates end-to-end code for executing SLMs, fully exploiting the RV32 cores' instruction extensions and the NPU: We achieve leading-edge energy and throughput of \SI{490}{\micro\joule \per Token}, at \SI{340}{Token \per \second} for an SLM trained on the TinyStories dataset, running for the first time on an MCU-class device without external memory.
Multi-resolution Rescored ByteTrack for Video Object Detection on Ultra-low-power Embedded Systems
Apr 17, 2024



This paper introduces Multi-Resolution Rescored Byte-Track (MR2-ByteTrack), a novel video object detection framework for ultra-low-power embedded processors. This method reduces the average compute load of an off-the-shelf Deep Neural Network (DNN) based object detector by up to 2.25$\times$ by alternating the processing of high-resolution images (320$\times$320 pixels) with multiple down-sized frames (192$\times$192 pixels). To tackle the accuracy degradation due to the reduced image input size, MR2-ByteTrack correlates the output detections over time using the ByteTrack tracker and corrects potential misclassification using a novel probabilistic Rescore algorithm. By interleaving two down-sized images for every high-resolution one as the input of different state-of-the-art DNN object detectors with our MR2-ByteTrack, we demonstrate an average accuracy increase of 2.16% and a latency reduction of 43% on the GAP9 microcontroller compared to a baseline frame-by-frame inference scheme using exclusively full-resolution images. Code available at: https://github.com/Bomps4/Multi_Resolution_Rescored_ByteTrack
Multi-sensory Anti-collision Design for Autonomous Nano-swarm Exploration
Dec 20, 2023This work presents a multi-sensory anti-collision system design to achieve robust autonomous exploration capabilities for a swarm of 10 cm-side nano-drones operating on object detection missions. We combine lightweight single-beam laser ranging to avoid proximity collisions with a long-range vision-based obstacle avoidance deep learning model (i.e., PULP-Dronet) and an ultra-wide-band (UWB) based ranging module to prevent intra-swarm collisions. An in-field study shows that our multisensory approach can prevent collisions with static obstacles, improving the mission success rate from 20% to 80% in cluttered environments w.r.t. a State-of-the-Art (SoA) baseline. At the same time, the UWB-based sub-system shows a 92.8% success rate in preventing collisions between drones of a four-agent fleet within a safety distance of 65 cm. On a SoA robotic platform extended by a GAP8 multi-core processor, the PULP-Dronet runs interleaved with an objected detection task, which constraints its execution at 1.6 frame/s. This throughput is sufficient for avoiding obstacles with a probability of about 40% but shows a need for more capable processors for the next-generation nano-drone swarms.
Bio-inspired Autonomous Exploration Policies with CNN-based Object Detection on Nano-drones
Feb 01, 2023Nano-sized drones, with palm-sized form factor, are gaining relevance in the Internet-of-Things ecosystem. Achieving a high degree of autonomy for complex multi-objective missions (e.g., safe flight, exploration, object detection) is extremely challenging for the onboard chip-set due to tight size, payload (<10g), and power envelope constraints, which strictly limit both memory and computation. Our work addresses this complex problem by combining bio-inspired navigation policies, which rely on time-of-flight distance sensor data, with a vision-based convolutional neural network (CNN) for object detection. Our field-proven nano-drone is equipped with two microcontroller units (MCUs), a single-core ARM Cortex-M4 (STM32) for safe navigation and exploration policies, and a parallel ultra-low power octa-core RISC-V (GAP8) for onboard CNN inference, with a power envelope of just 134mW, including image sensors and external memories. The object detection task achieves a mean average precision of 50% (at 1.6 frame/s) on an in-field collected dataset. We compare four bio-inspired exploration policies and identify a pseudo-random policy to achieve the highest coverage area of 83% in a ~36m^2 unknown room in a 3 minutes flight. By combining the detection CNN and the exploration policy, we show an average detection rate of 90% on six target objects in a never-seen-before environment.