 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentEHR: Advancing Autonomous Clinical Decision-Making via Retrospective Summarization
Jan 20, 2026Large Language Models have demonstrated profound utility in the medical domain. However, their application to autonomous Electronic Health Records~(EHRs) navigation remains constrained by a reliance on curated inputs and simplified retrieval tasks. To bridge the gap between idealized experimental settings and realistic clinical environments, we present AgentEHR. This benchmark challenges agents to execute complex decision-making tasks, such as diagnosis and treatment planning, requiring long-range interactive reasoning directly within raw and high-noise databases. In tackling these tasks, we identify that existing summarization methods inevitably suffer from critical information loss and fractured reasoning continuity. To address this, we propose RetroSum, a novel framework that unifies a retrospective summarization mechanism with an evolving experience strategy. By dynamically re-evaluating interaction history, the retrospective mechanism prevents long-context information loss and ensures unbroken logical coherence. Additionally, the evolving strategy bridges the domain gap by retrieving accumulated experience from a memory bank. Extensive empirical evaluations demonstrate that RetroSum achieves performance gains of up to 29.16% over competitive baselines, while significantly decreasing total interaction errors by up to 92.3%.
A novel forecasting framework combining virtual samples and enhanced Transformer models for tourism demand forecasting
Mar 25, 2025Accurate tourism demand forecasting is hindered by limited historical data and complex spatiotemporal dependencies among tourist origins. A novel forecasting framework integrating virtual sample generation and a novel Transformer predictor addresses constraints arising from restricted data availability. A spatiotemporal GAN produces realistic virtual samples by dynamically modeling spatial correlations through a graph convolutional network, and an enhanced Transformer captures local patterns with causal convolutions and long-term dependencies with self-attention,eliminating autoregressive decoding. A joint training strategy refines virtual sample generation based on predictor feedback to maintain robust performance under data-scarce conditions. Experimental evaluations on real-world daily and monthly tourism demand datasets indicate a reduction in average MASE by 18.37% compared to conventional Transformer-based models, demonstrating improved forecasting accuracy. The integration of adaptive spatiotemporal sample augmentation with a specialized Transformer can effectively address limited-data forecasting scenarios in tourism management.
Free Lunch for Federated Remote Sensing Target Fine-Grained Classification: A Parameter-Efficient Framework
Jan 03, 2024Remote Sensing Target Fine-grained Classification (TFGC) is of great significance in both military and civilian fields. Due to location differences, growth in data size, and centralized server storage constraints, these data are usually stored under different databases across regions/countries. However, privacy laws and national security concerns constrain researchers from accessing these sensitive remote sensing images for further analysis. Additionally, low-resource remote sensing devices encounter challenges in terms of communication overhead and efficiency when dealing with the ever-increasing data and model scales. To solve the above challenges, this paper proposes a novel Privacy-Reserving TFGC Framework based on Federated Learning, dubbed PRFL. The proposed framework allows each client to learn global and local knowledge to enhance the local representation of private data in environments with extreme statistical heterogeneity (non. Independent and Identically Distributed, IID). Thus, it provides highly customized models to clients with differentiated data distributions. Moreover, the framework minimizes communication overhead and improves efficiency while ensuring satisfactory performance, thereby enhancing robustness and practical applicability under resource-scarce conditions. We demonstrate the effectiveness of the proposed PRFL on the classical TFGC task by leveraging four public datasets.
Geometer: Graph Few-Shot Class-Incremental Learning via Prototype Representation
Jun 03, 2022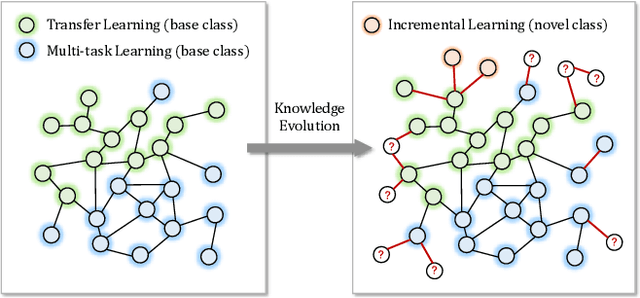
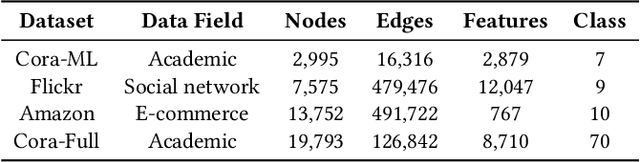
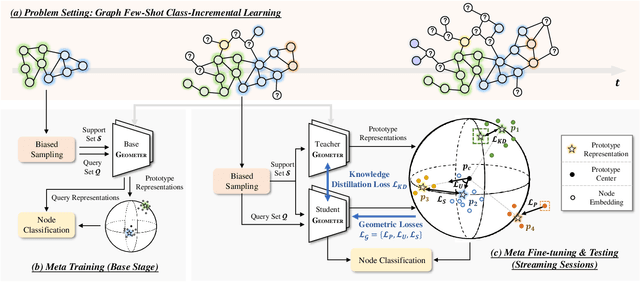
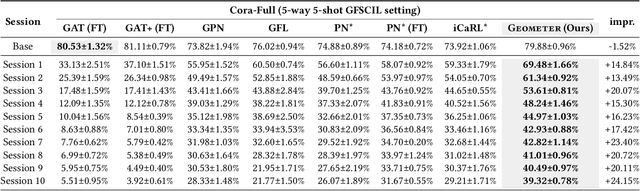
With the tremendous expansion of graphs data, node classification shows its great importance in many real-world applications. Existing graph neural network based methods mainly focus on classifying unlabeled nodes within fixed classes with abundant labeling. However, in many practical scenarios, graph evolves with emergence of new nodes and edges. Novel classes appear incrementally along with few labeling due to its newly emergence or lack of exploration. In this paper, we focus on this challenging but practical graph few-shot class-incremental learning (GFSCIL) problem and propose a novel method called Geometer. Instead of replacing and retraining the fully connected neural network classifer, Geometer predicts the label of a node by finding the nearest class prototype. Prototype is a vector representing a class in the metric space. With the pop-up of novel classes, Geometer learns and adjusts the attention-based prototypes by observing the geometric proximity, uniformity and separability. Teacher-student knowledge distillation and biased sampling are further introduced to mitigate catastrophic forgetting and unbalanced labeling problem respectively. Experimental results on four public datasets demonstrate that Geometer achieves a substantial improvement of 9.46% to 27.60% over state-of-the-art methods.
Directionally Constrained Fully Convolutional Neural Network For Airborne Lidar Point Cloud Classification
Aug 19, 2019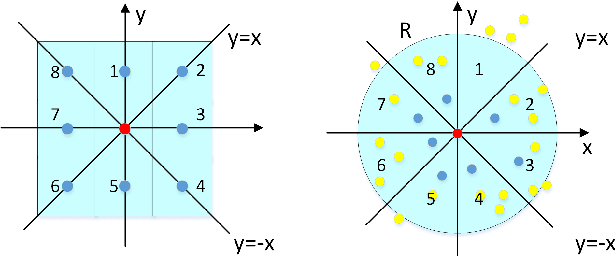
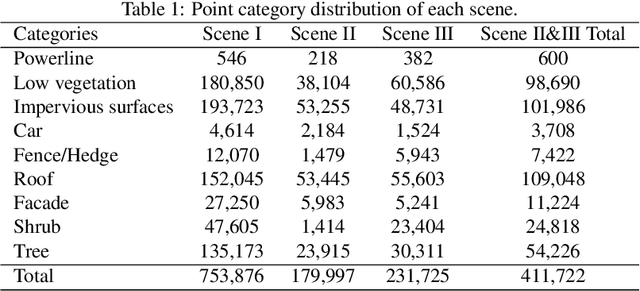
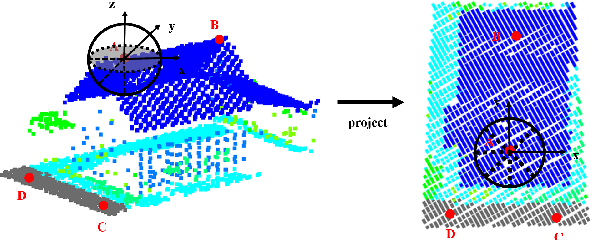
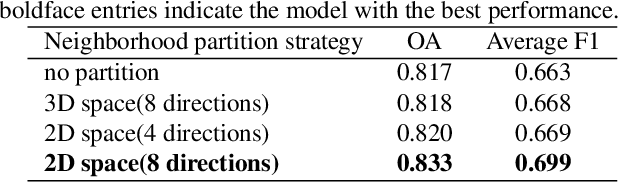
Point cloud classification plays an important role in a wide range of airborne light detection and ranging (LiDAR) applications, such as topographic mapping, forest monitoring, power line detection, and road detection. However, due to the sensor noise, high redundancy, incompleteness, and complexity of airborne LiDAR systems, point cloud classification is challenging. In this paper, we proposed a directionally constrained fully convolutional neural network (D-FCN) that can take the original 3D coordinates and LiDAR intensity as input; thus, it can directly apply to unstructured 3D point clouds for semantic labeling. Specifically, we first introduce a novel directionally constrained point convolution (D-Conv) module to extract locally representative features of 3D point sets from the projected 2D receptive fields. To make full use of the orientation information of neighborhood points, the proposed D-Conv module performs convolution in an orientation-aware manner by using a directionally constrained nearest neighborhood search. Then, we designed a multiscale fully convolutional neural network with downsampling and upsampling blocks to enable multiscale point feature learning. The proposed D-FCN model can therefore process input point cloud with arbitrary sizes and directly predict the semantic labels for all the input points in an end-to-end manner. Without involving additional geometry features as input, the proposed method has demonstrated superior performance on the International Society for Photogrammetry and Remote Sensing (ISPRS) 3D labeling benchmark dataset. The results show that our model has achieved a new state-of-the-art level of performance with an average F1 score of 70.7%, and it has improved the performance by a large margin on categories with a small number of points (such as powerline, car, and facade).