 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmazon SageMaker Autopilot: a white box AutoML solution at scale
Dec 16, 2020
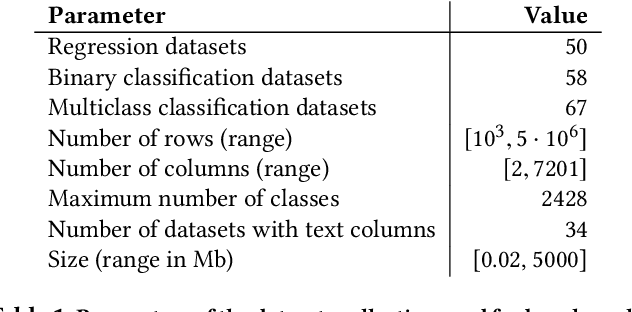
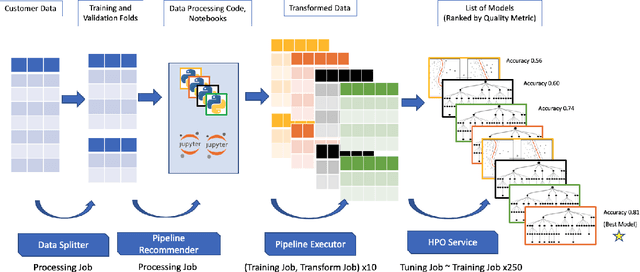
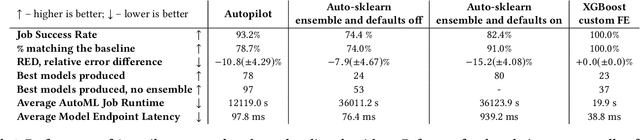
AutoML systems provide a black-box solution to machine learning problems by selecting the right way of processing features, choosing an algorithm and tuning the hyperparameters of the entire pipeline. Although these systems perform well on many datasets, there is still a non-negligible number of datasets for which the one-shot solution produced by each particular system would provide sub-par performance. In this paper, we present Amazon SageMaker Autopilot: a fully managed system providing an automated ML solution that can be modified when needed. Given a tabular dataset and the target column name, Autopilot identifies the problem type, analyzes the data and produces a diverse set of complete ML pipelines including feature preprocessing and ML algorithms, which are tuned to generate a leaderboard of candidate models. In the scenario where the performance is not satisfactory, a data scientist is able to view and edit the proposed ML pipelines in order to infuse their expertise and business knowledge without having to revert to a fully manual solution. This paper describes the different components of Autopilot, emphasizing the infrastructure choices that allow scalability, high quality models, editable ML pipelines, consumption of artifacts of offline meta-learning, and a convenient integration with the entire SageMaker suite allowing these trained models to be used in a production setting.
DeepRacer: Educational Autonomous Racing Platform for Experimentation with Sim2Real Reinforcement Learning
Nov 05, 2019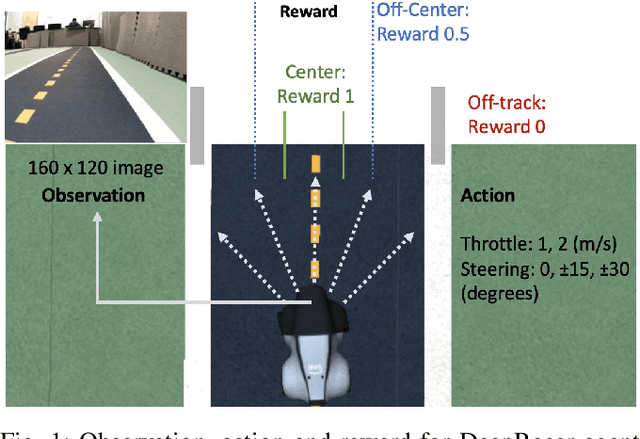
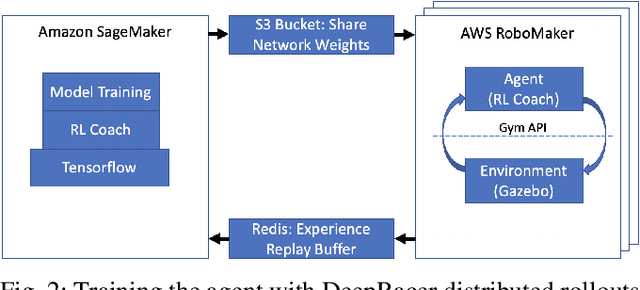
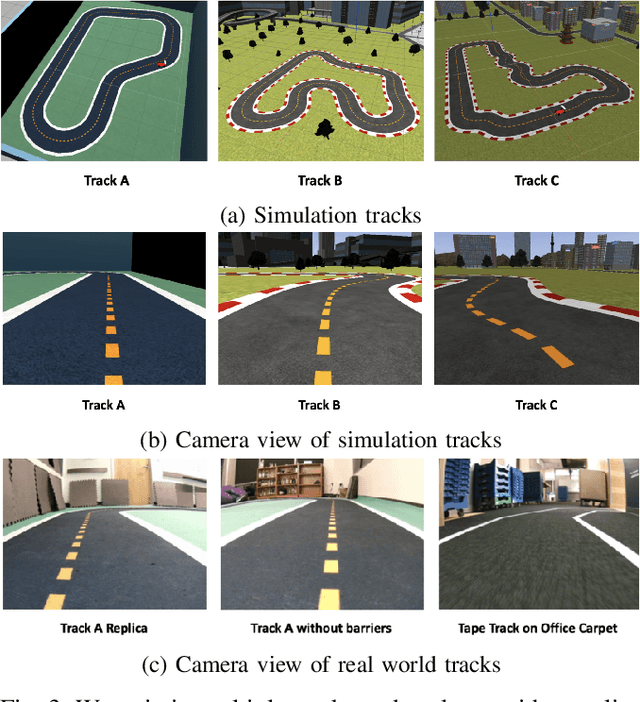
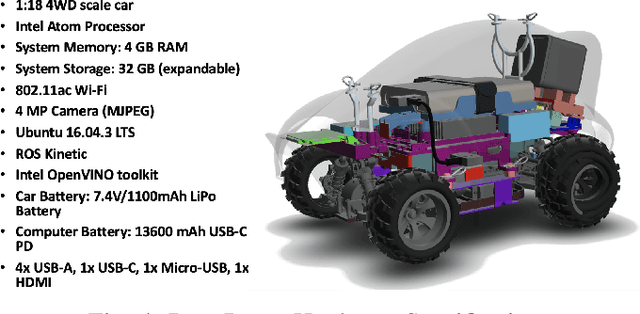
DeepRacer is a platform for end-to-end experimentation with RL and can be used to systematically investigate the key challenges in developing intelligent control systems. Using the platform, we demonstrate how a 1/18th scale car can learn to drive autonomously using RL with a monocular camera. It is trained in simulation with no additional tuning in physical world and demonstrates: 1) formulation and solution of a robust reinforcement learning algorithm, 2) narrowing the reality gap through joint perception and dynamics, 3) distributed on-demand compute architecture for training optimal policies, and 4) a robust evaluation method to identify when to stop training. It is the first successful large-scale deployment of deep reinforcement learning on a robotic control agent that uses only raw camera images as observations and a model-free learning method to perform robust path planning. We open source our code and video demo on GitHub: https://git.io/fjxoJ.