 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepRacer: Educational Autonomous Racing Platform for Experimentation with Sim2Real Reinforcement Learning
Nov 05, 2019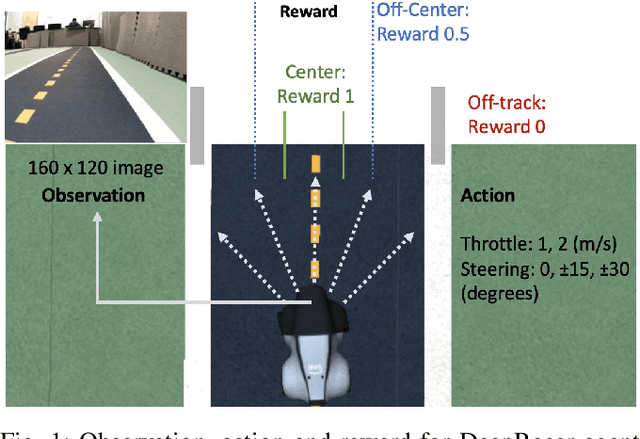
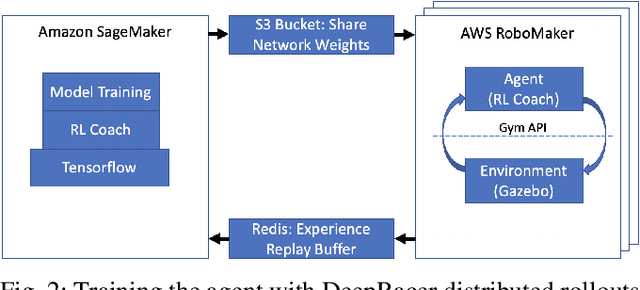
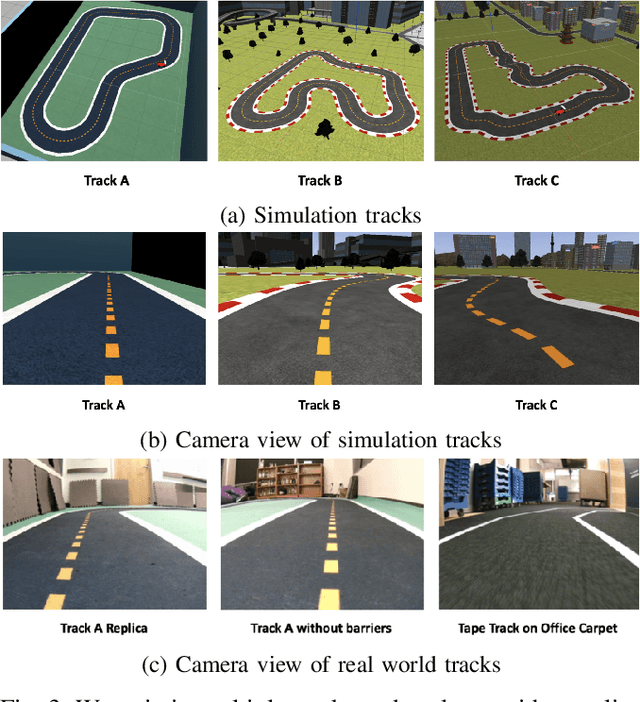
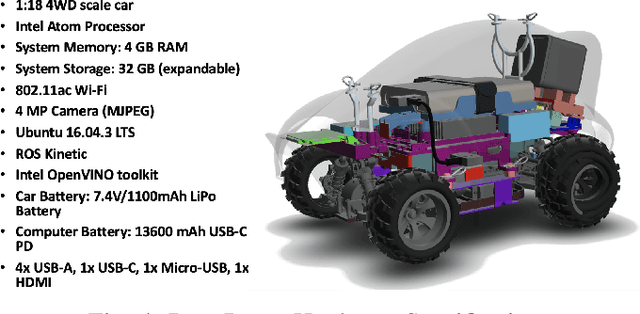
DeepRacer is a platform for end-to-end experimentation with RL and can be used to systematically investigate the key challenges in developing intelligent control systems. Using the platform, we demonstrate how a 1/18th scale car can learn to drive autonomously using RL with a monocular camera. It is trained in simulation with no additional tuning in physical world and demonstrates: 1) formulation and solution of a robust reinforcement learning algorithm, 2) narrowing the reality gap through joint perception and dynamics, 3) distributed on-demand compute architecture for training optimal policies, and 4) a robust evaluation method to identify when to stop training. It is the first successful large-scale deployment of deep reinforcement learning on a robotic control agent that uses only raw camera images as observations and a model-free learning method to perform robust path planning. We open source our code and video demo on GitHub: https://git.io/fjxoJ.
FineText: Text Classification via Attention-based Language Model Fine-tuning
Oct 25, 2019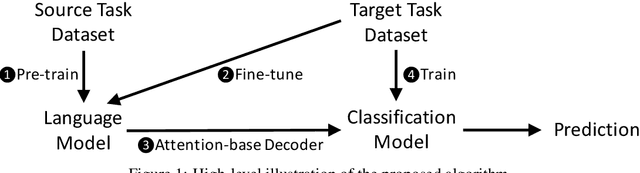
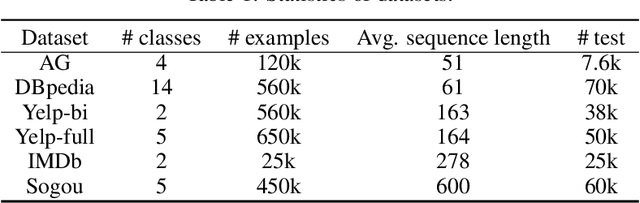

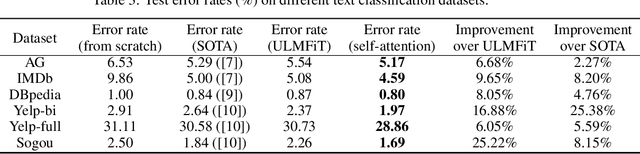
Training deep neural networks from scratch on natural language processing (NLP) tasks requires significant amount of manually labeled text corpus and substantial time to converge, which usually cannot be satisfied by the customers. In this paper, we aim to develop an effective transfer learning algorithm by fine-tuning a pre-trained language model. The goal is to provide expressive and convenient-to-use feature extractors for downstream NLP tasks, and achieve improvement in terms of accuracy, data efficiency, and generalization to new domains. Therefore, we propose an attention-based fine-tuning algorithm that automatically selects relevant contextualized features from the pre-trained language model and uses those features on downstream text classification tasks. We test our methods on six widely-used benchmarking datasets, and achieve new state-of-the-art performance on all of them. Moreover, we then introduce an alternative multi-task learning approach, which is an end-to-end algorithm given the pre-trained model. By doing multi-task learning, one can largely reduce the total training time by trading off some classification accuracy.