 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedDis: A Causal Disentanglement Framework for Federated Traffic Prediction
Jan 30, 2026Federated learning offers a promising paradigm for privacy-preserving traffic prediction, yet its performance is often challenged by the non-identically and independently distributed (non-IID) nature of decentralized traffic data. Existing federated methods frequently struggle with this data heterogeneity, typically entangling globally shared patterns with client-specific local dynamics within a single representation. In this work, we postulate that this heterogeneity stems from the entanglement of two distinct generative sources: client-specific localized dynamics and cross-client global spatial-temporal patterns. Motivated by this perspective, we introduce FedDis, a novel framework that, to the best of our knowledge, is the first to leverage causal disentanglement for federated spatial-temporal prediction. Architecturally, FedDis comprises a dual-branch design wherein a Personalized Bank learns to capture client-specific factors, while a Global Pattern Bank distills common knowledge. This separation enables robust cross-client knowledge transfer while preserving high adaptability to unique local environments. Crucially, a mutual information minimization objective is employed to enforce informational orthogonality between the two branches, thereby ensuring effective disentanglement. Comprehensive experiments conducted on four real-world benchmark datasets demonstrate that FedDis consistently achieves state-of-the-art performance, promising efficiency, and superior expandability.
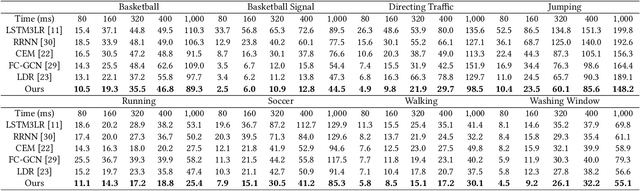
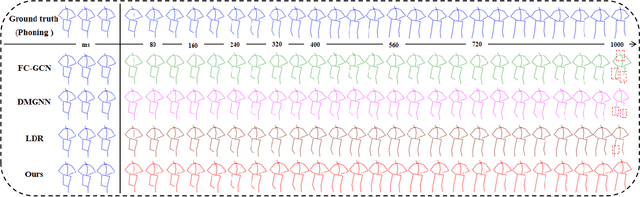
Breaking the Passive Learning Trap: An Active Perception Strategy for Human Motion Prediction
Nov 18, 2025Forecasting 3D human motion is an important embodiment of fine-grained understanding and cognition of human behavior by artificial agents. Current approaches excessively rely on implicit network modeling of spatiotemporal relationships and motion characteristics, falling into the passive learning trap that results in redundant and monotonous 3D coordinate information acquisition while lacking actively guided explicit learning mechanisms. To overcome these issues, we propose an Active Perceptual Strategy (APS) for human motion prediction, leveraging quotient space representations to explicitly encode motion properties while introducing auxiliary learning objectives to strengthen spatio-temporal modeling. Specifically, we first design a data perception module that projects poses into the quotient space, decoupling motion geometry from coordinate redundancy. By jointly encoding tangent vectors and Grassmann projections, this module simultaneously achieves geometric dimension reduction, semantic decoupling, and dynamic constraint enforcement for effective motion pose characterization. Furthermore, we introduce a network perception module that actively learns spatio-temporal dependencies through restorative learning. This module deliberately masks specific joints or injects noise to construct auxiliary supervision signals. A dedicated auxiliary learning network is designed to actively adapt and learn from perturbed information. Notably, APS is model agnostic and can be integrated with different prediction models to enhance active perceptual. The experimental results demonstrate that our method achieves the new state-of-the-art, outperforming existing methods by large margins: 16.3% on H3.6M, 13.9% on CMU Mocap, and 10.1% on 3DPW.
HVIS: A Human-like Vision and Inference System for Human Motion Prediction
Feb 24, 2025Grasping the intricacies of human motion, which involve perceiving spatio-temporal dependence and multi-scale effects, is essential for predicting human motion. While humans inherently possess the requisite skills to navigate this issue, it proves to be markedly more challenging for machines to emulate. To bridge the gap, we propose the Human-like Vision and Inference System (HVIS) for human motion prediction, which is designed to emulate human observation and forecast future movements. HVIS comprises two components: the human-like vision encode (HVE) module and the human-like motion inference (HMI) module. The HVE module mimics and refines the human visual process, incorporating a retina-analog component that captures spatiotemporal information separately to avoid unnecessary crosstalk. Additionally, a visual cortex-analogy component is designed to hierarchically extract and treat complex motion features, focusing on both global and local features of human poses. The HMI is employed to simulate the multi-stage learning model of the human brain. The spontaneous learning network simulates the neuronal fracture generation process for the adversarial generation of future motions. Subsequently, the deliberate learning network is optimized for hard-to-train joints to prevent misleading learning. Experimental results demonstrate that our method achieves new state-of-the-art performance, significantly outperforming existing methods by 19.8% on Human3.6M, 15.7% on CMU Mocap, and 11.1% on G3D.
3D Human Motion Prediction: A Survey
Mar 07, 2022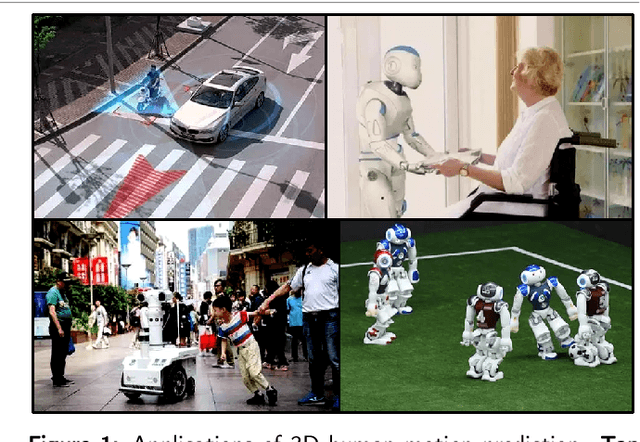
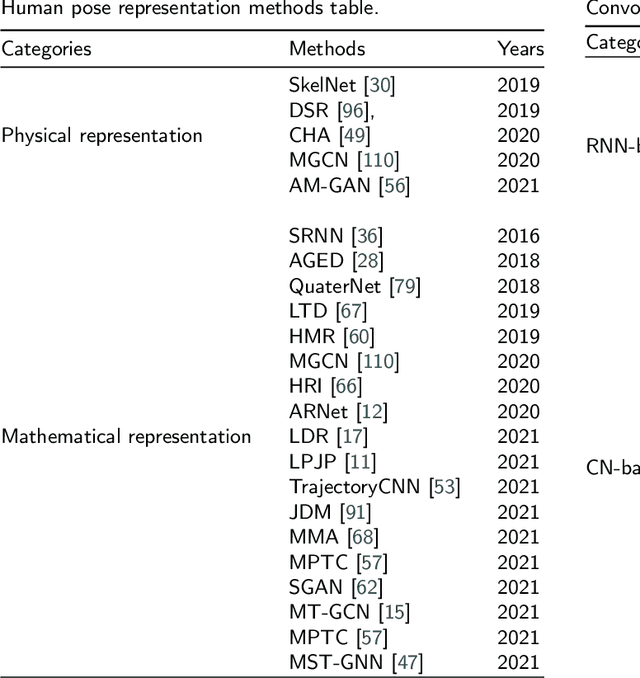
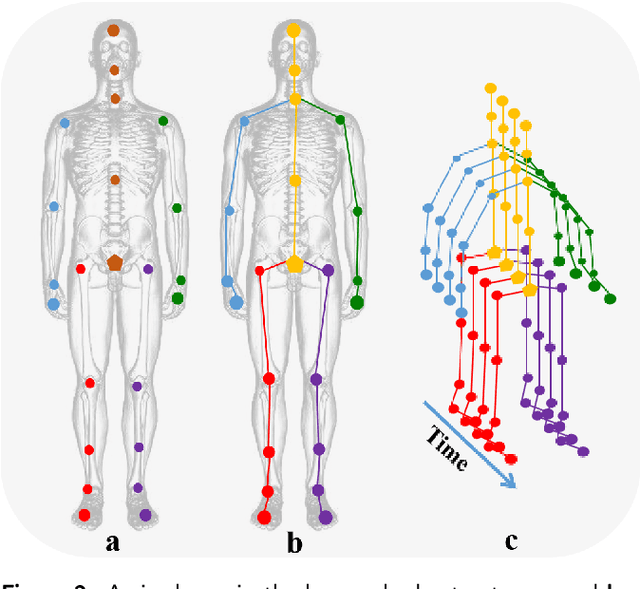
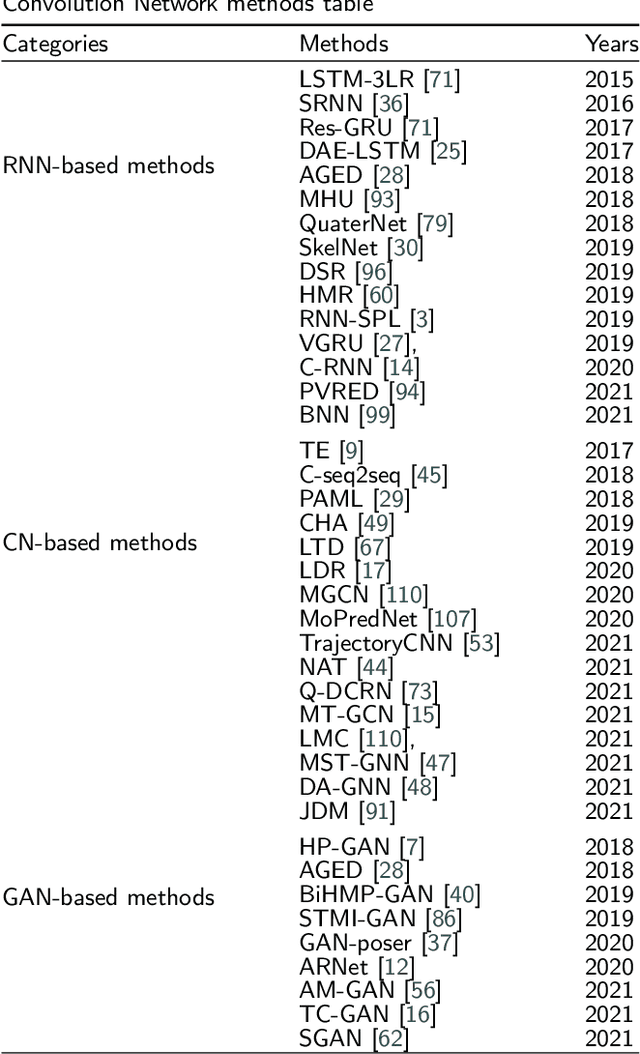
3D human motion prediction, predicting future poses from a given sequence, is an issue of great significance and challenge in computer vision and machine intelligence, which can help machines in understanding human behaviors. Due to the increasing development and understanding of Deep Neural Networks (DNNs) and the availability of large-scale human motion datasets, the human motion prediction has been remarkably advanced with a surge of interest among academia and industrial community. In this context, a comprehensive survey on 3D human motion prediction is conducted for the purpose of retrospecting and analyzing relevant works from existing released literature. In addition, a pertinent taxonomy is constructed to categorize these existing approaches for 3D human motion prediction. In this survey, relevant methods are categorized into three categories: human pose representation, network structure design, and \textit{prediction target}. We systematically review all relevant journal and conference papers in the field of human motion prediction since 2015, which are presented in detail based on proposed categorizations in this survey. Furthermore, the outline for the public benchmark datasets, evaluation criteria, and performance comparisons are respectively presented in this paper. The limitations of the state-of-the-art methods are discussed as well, hoping for paving the way for future explorations.
Learning Human Motion Prediction via Stochastic Differential Equations
Dec 21, 2021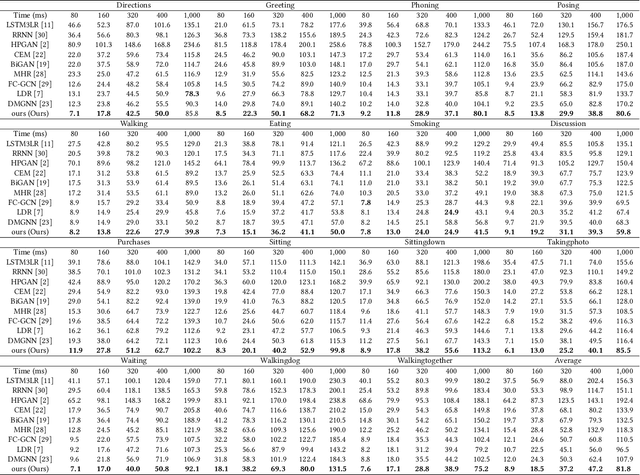
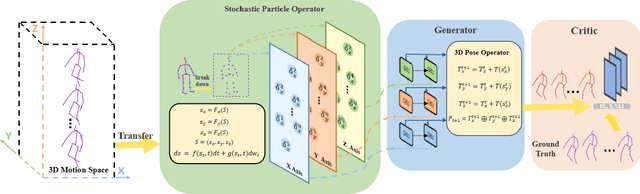
Human motion understanding and prediction is an integral aspect in our pursuit of machine intelligence and human-machine interaction systems. Current methods typically pursue a kinematics modeling approach, relying heavily upon prior anatomical knowledge and constraints. However, such an approach is hard to generalize to different skeletal model representations, and also tends to be inadequate in accounting for the dynamic range and complexity of motion, thus hindering predictive accuracy. In this work, we propose a novel approach in modeling the motion prediction problem based on stochastic differential equations and path integrals. The motion profile of each skeletal joint is formulated as a basic stochastic variable and modeled with the Langevin equation. We develop a strategy of employing GANs to simulate path integrals that amounts to optimizing over possible future paths. We conduct experiments in two large benchmark datasets, Human 3.6M and CMU MoCap. It is highlighted that our approach achieves a 12.48% accuracy improvement over current state-of-the-art methods in average.
Aggregated Multi-GANs for Controlled 3D Human Motion Prediction
Mar 17, 2021
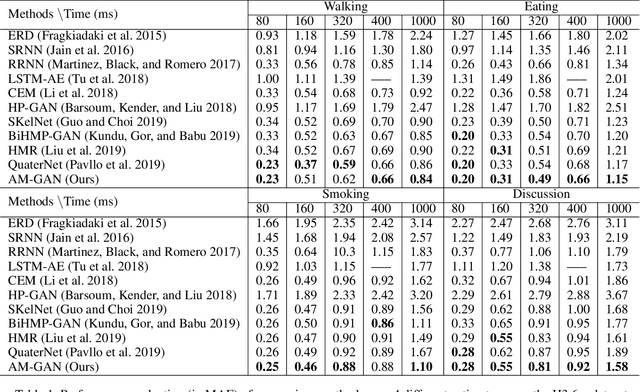
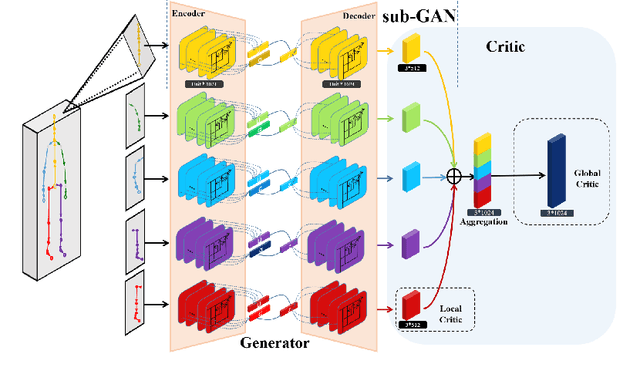
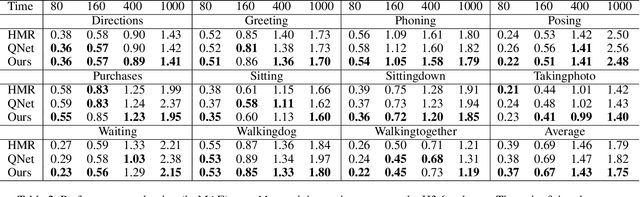
Human motion prediction from historical pose sequence is at the core of many applications in machine intelligence. However, in current state-of-the-art methods, the predicted future motion is confined within the same activity. One can neither generate predictions that differ from the current activity, nor manipulate the body parts to explore various future possibilities. Undoubtedly, this greatly limits the usefulness and applicability of motion prediction. In this paper, we propose a generalization of the human motion prediction task in which control parameters can be readily incorporated to adjust the forecasted motion. Our method is compelling in that it enables manipulable motion prediction across activity types and allows customization of the human movement in a variety of fine-grained ways. To this aim, a simple yet effective composite GAN structure, consisting of local GANs for different body parts and aggregated via a global GAN is presented. The local GANs game in lower dimensions, while the global GAN adjusts in high dimensional space to avoid mode collapse. Extensive experiments show that our method outperforms state-of-the-art. The codes are available at https://github.com/herolvkd/AM-GAN.