 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Evolutionary Algorithm for Few-for-Many Optimization
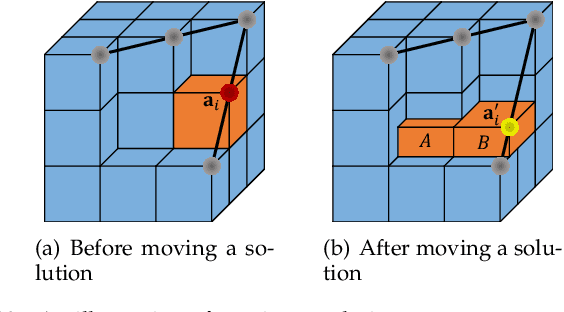
Jan 10, 2026Few-for-many (F4M) optimization, recently introduced as a novel paradigm in multi-objective optimization, aims to find a small set of solutions that effectively handle a large number of conflicting objectives. Unlike traditional many-objective optimization methods, which typically attempt comprehensive coverage of the Pareto front, F4M optimization emphasizes finding a small representative solution set to efficiently address high-dimensional objective spaces. Motivated by the computational complexity and practical relevance of F4M optimization, this paper proposes a new evolutionary algorithm explicitly tailored for efficiently solving F4M optimization problems. Inspired by SMS-EMOA, our proposed approach employs a $(μ+1)$-evolution strategy guided by the objective of F4M optimization. Furthermore, to facilitate rigorous performance assessment, we propose a novel benchmark test suite specifically designed for F4M optimization by leveraging the similarity between the R2 indicator and F4M formulations. Our test suite is highly flexible, allowing any existing multi-objective optimization problem to be transformed into a corresponding F4M instance via scalarization using the weighted Tchebycheff function. Comprehensive experimental evaluations on benchmarks demonstrate the superior performance of our algorithm compared to existing state-of-the-art algorithms, especially on instances involving a large number of objectives. The source code of the proposed algorithm will be released publicly. Source code is available at https://github.com/MOL-SZU/SoM-EMOA.
InfoBFR: Real-World Blind Face Restoration via Information Bottleneck
Jan 26, 2025



Blind face restoration (BFR) is a highly challenging problem due to the uncertainty of data degradation patterns. Current BFR methods have realized certain restored productions but with inherent neural degradations that limit real-world generalization in complicated scenarios. In this paper, we propose a plug-and-play framework InfoBFR to tackle neural degradations, e.g., prior bias, topological distortion, textural distortion, and artifact residues, which achieves high-generalization face restoration in diverse wild and heterogeneous scenes. Specifically, based on the results from pre-trained BFR models, InfoBFR considers information compression using manifold information bottleneck (MIB) and information compensation with efficient diffusion LoRA to conduct information optimization. InfoBFR effectively synthesizes high-fidelity faces without attribute and identity distortions. Comprehensive experimental results demonstrate the superiority of InfoBFR over state-of-the-art GAN-based and diffusion-based BFR methods, with around 70ms consumption, 16M trainable parameters, and nearly 85% BFR-boosting. It is promising that InfoBFR will be the first plug-and-play restorer universally employed by diverse BFR models to conquer neural degradations.
Learning Pareto Set for Multi-Objective Continuous Robot Control
Jun 27, 2024



For a control problem with multiple conflicting objectives, there exists a set of Pareto-optimal policies called the Pareto set instead of a single optimal policy. When a multi-objective control problem is continuous and complex, traditional multi-objective reinforcement learning (MORL) algorithms search for many Pareto-optimal deep policies to approximate the Pareto set, which is quite resource-consuming. In this paper, we propose a simple and resource-efficient MORL algorithm that learns a continuous representation of the Pareto set in a high-dimensional policy parameter space using a single hypernet. The learned hypernet can directly generate various well-trained policy networks for different user preferences. We compare our method with two state-of-the-art MORL algorithms on seven multi-objective continuous robot control problems. Experimental results show that our method achieves the best overall performance with the least training parameters. An interesting observation is that the Pareto set is well approximated by a curved line or surface in a high-dimensional parameter space. This observation will provide insight for researchers to design new MORL algorithms.
DiffMAC: Diffusion Manifold Hallucination Correction for High Generalization Blind Face Restoration
Mar 15, 2024Blind face restoration (BFR) is a highly challenging problem due to the uncertainty of degradation patterns. Current methods have low generalization across photorealistic and heterogeneous domains. In this paper, we propose a Diffusion-Information-Diffusion (DID) framework to tackle diffusion manifold hallucination correction (DiffMAC), which achieves high-generalization face restoration in diverse degraded scenes and heterogeneous domains. Specifically, the first diffusion stage aligns the restored face with spatial feature embedding of the low-quality face based on AdaIN, which synthesizes degradation-removal results but with uncontrollable artifacts for some hard cases. Based on Stage I, Stage II considers information compression using manifold information bottleneck (MIB) and finetunes the first diffusion model to improve facial fidelity. DiffMAC effectively fights against blind degradation patterns and synthesizes high-quality faces with attribute and identity consistencies. Experimental results demonstrate the superiority of DiffMAC over state-of-the-art methods, with a high degree of generalization in real-world and heterogeneous settings. The source code and models will be public.
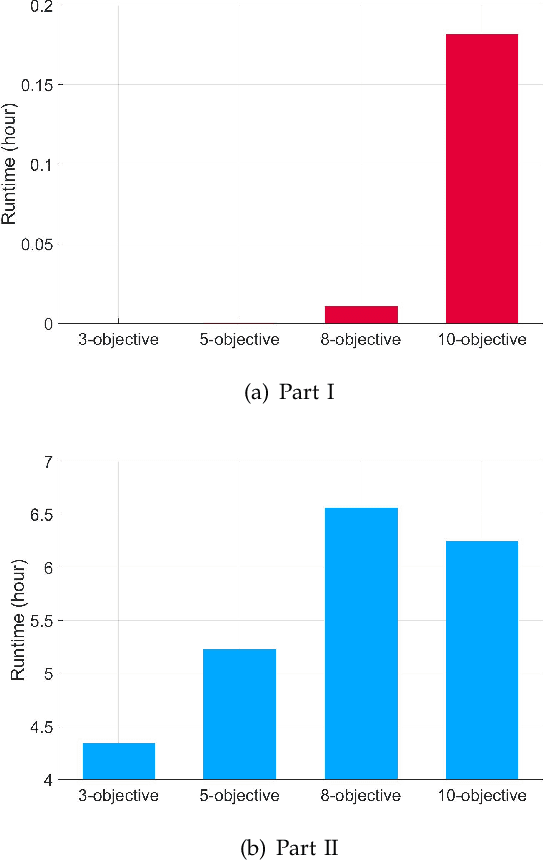
Effects of Archive Size on Computation Time and Solution Quality for Multi-Objective Optimization
Sep 07, 2022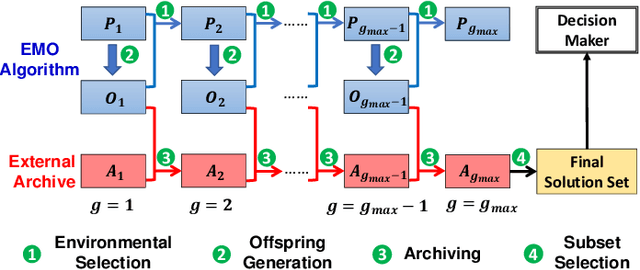
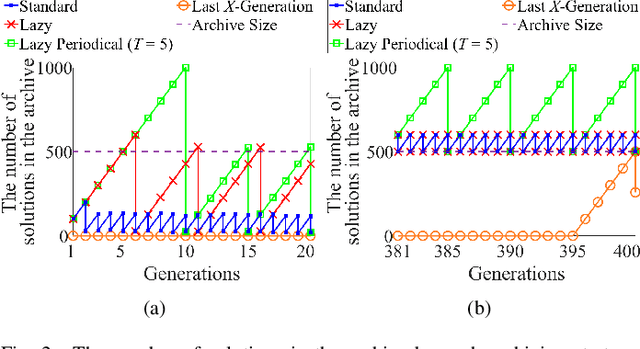
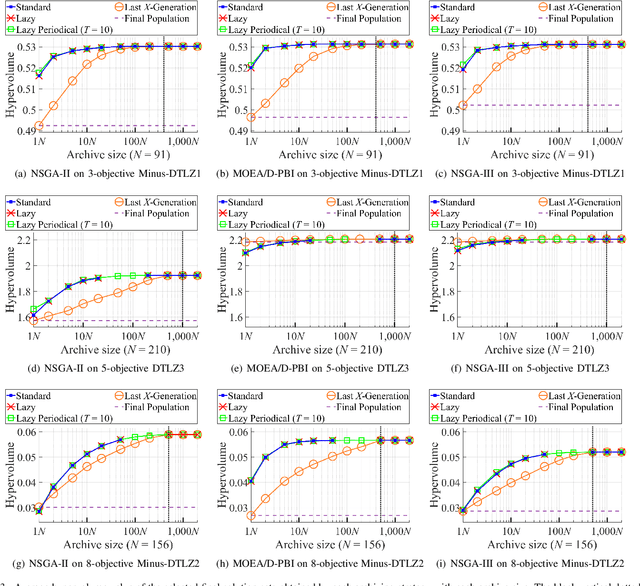
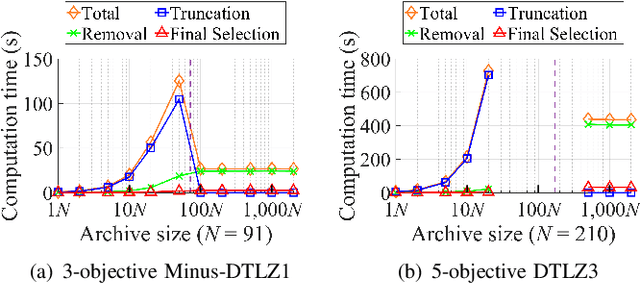
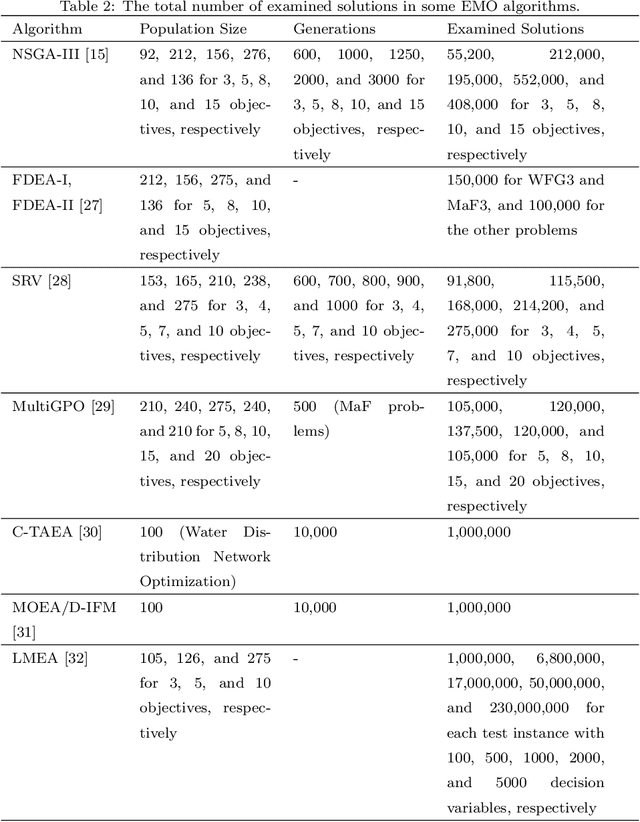
An unbounded external archive has been used to store all nondominated solutions found by an evolutionary multi-objective optimization algorithm in some studies. It has been shown that a selected solution subset from the stored solutions is often better than the final population. However, the use of the unbounded archive is not always realistic. When the number of examined solutions is huge, we must pre-specify the archive size. In this study, we examine the effects of the archive size on three aspects: (i) the quality of the selected final solution set, (ii) the total computation time for the archive maintenance and the final solution set selection, and (iii) the required memory size. Unsurprisingly, the increase of the archive size improves the final solution set quality. Interestingly, the total computation time of a medium-size archive is much larger than that of a small-size archive and a huge-size archive (e.g., an unbounded archive). To decrease the computation time, we examine two ideas: periodical archive update and archiving only in later generations. Compared with updating the archive at every generation, the first idea can obtain almost the same final solution set quality using a much shorter computation time at the cost of a slight increase of the memory size. The second idea drastically decreases the computation time at the cost of a slight deterioration of the final solution set quality. Based on our experimental results, some suggestions are given about how to appropriately choose an archiving strategy and an archive size.
HV-Net: Hypervolume Approximation based on DeepSets
Mar 04, 2022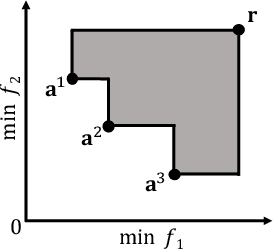
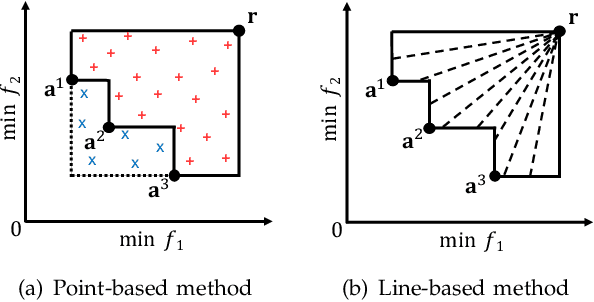
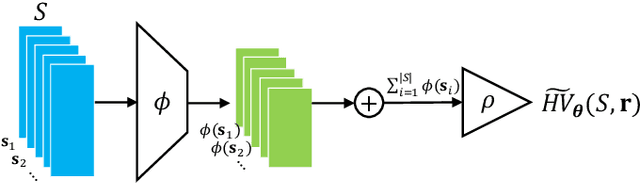
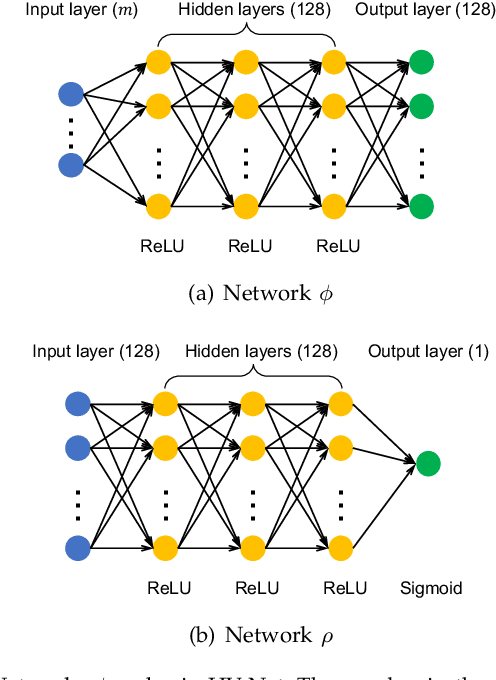
In this letter, we propose HV-Net, a new method for hypervolume approximation in evolutionary multi-objective optimization. The basic idea of HV-Net is to use DeepSets, a deep neural network with permutation invariant property, to approximate the hypervolume of a non-dominated solution set. The input of HV-Net is a non-dominated solution set in the objective space, and the output is an approximated hypervolume value of this solution set. The performance of HV-Net is evaluated through computational experiments by comparing it with two commonly-used hypervolume approximation methods (i.e., point-based method and line-based method). Our experimental results show that HV-Net outperforms the other two methods in terms of both the approximation error and the runtime, which shows the potential of using deep learning technique for hypervolume approximation.
Learning to Approximate: Auto Direction Vector Set Generation for Hypervolume Contribution Approximation
Jan 18, 2022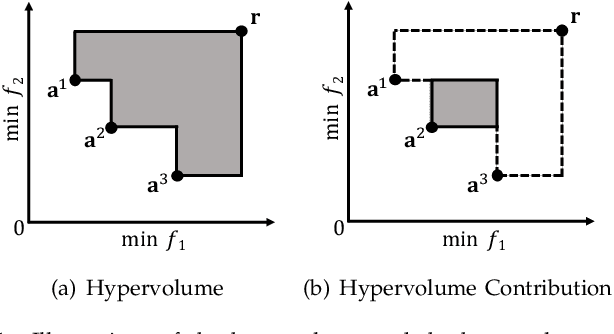

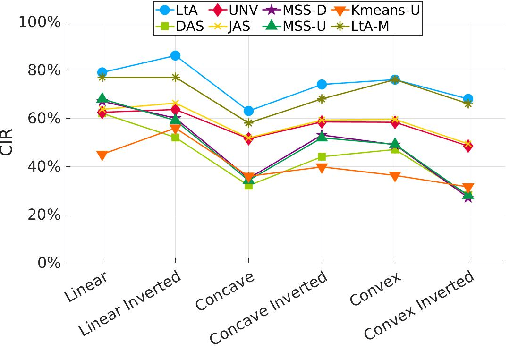
Hypervolume contribution is an important concept in evolutionary multi-objective optimization (EMO). It involves in hypervolume-based EMO algorithms and hypervolume subset selection algorithms. Its main drawback is that it is computationally expensive in high-dimensional spaces, which limits its applicability to many-objective optimization. Recently, an R2 indicator variant (i.e., $R_2^{\text{HVC}}$ indicator) is proposed to approximate the hypervolume contribution. The $R_2^{\text{HVC}}$ indicator uses line segments along a number of direction vectors for hypervolume contribution approximation. It has been shown that different direction vector sets lead to different approximation quality. In this paper, we propose \textit{Learning to Approximate (LtA)}, a direction vector set generation method for the $R_2^{\text{HVC}}$ indicator. The direction vector set is automatically learned from training data. The learned direction vector set can then be used in the $R_2^{\text{HVC}}$ indicator to improve its approximation quality. The usefulness of the proposed LtA method is examined by comparing it with other commonly-used direction vector set generation methods for the $R_2^{\text{HVC}}$ indicator. Experimental results suggest the superiority of LtA over the other methods for generating high quality direction vector sets.
Benchmarking Subset Selection from Large Candidate Solution Sets in Evolutionary Multi-objective Optimization
Jan 18, 2022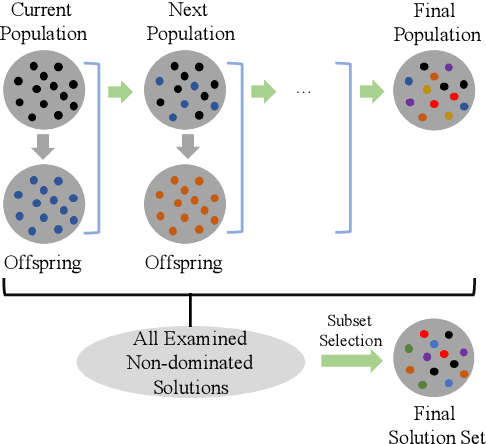
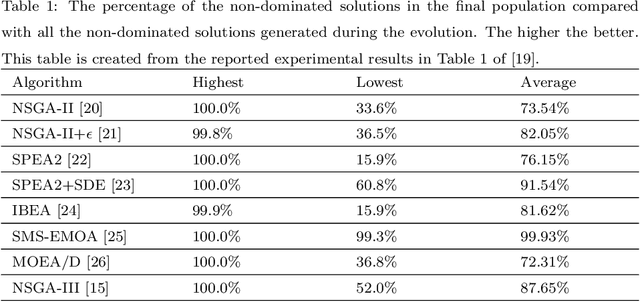
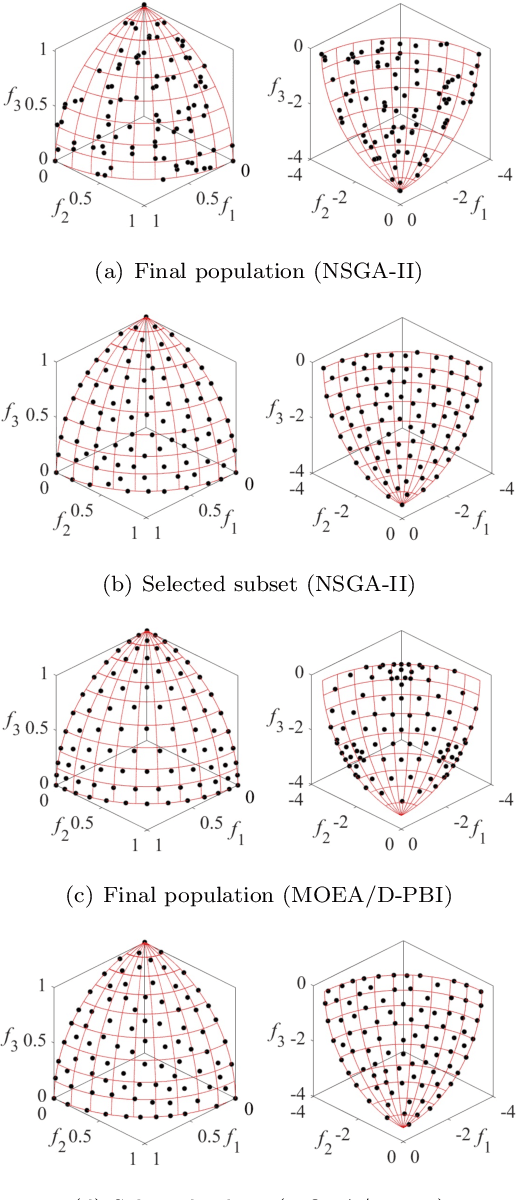
In the evolutionary multi-objective optimization (EMO) field, the standard practice is to present the final population of an EMO algorithm as the output. However, it has been shown that the final population often includes solutions which are dominated by other solutions generated and discarded in previous generations. Recently, a new EMO framework has been proposed to solve this issue by storing all the non-dominated solutions generated during the evolution in an archive and selecting a subset of solutions from the archive as the output. The key component in this framework is the subset selection from the archive which usually stores a large number of candidate solutions. However, most studies on subset selection focus on small candidate solution sets for environmental selection. There is no benchmark test suite for large-scale subset selection. This paper aims to fill this research gap by proposing a benchmark test suite for subset selection from large candidate solution sets, and comparing some representative methods using the proposed test suite. The proposed test suite together with the benchmarking studies provides a baseline for researchers to understand, use, compare, and develop subset selection methods in the EMO field.
Clustering-Based Subset Selection in Evolutionary Multiobjective Optimization
Aug 29, 2021
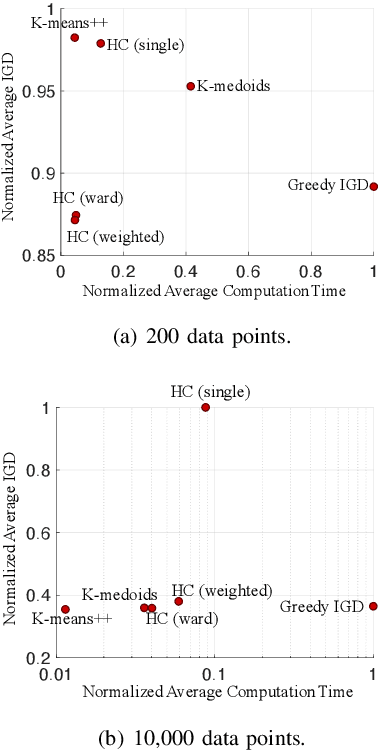
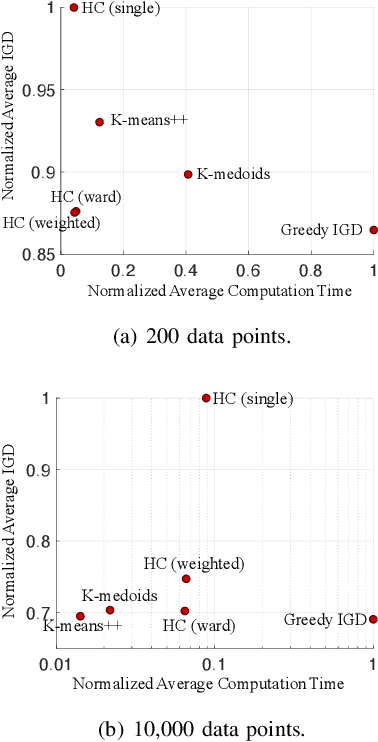
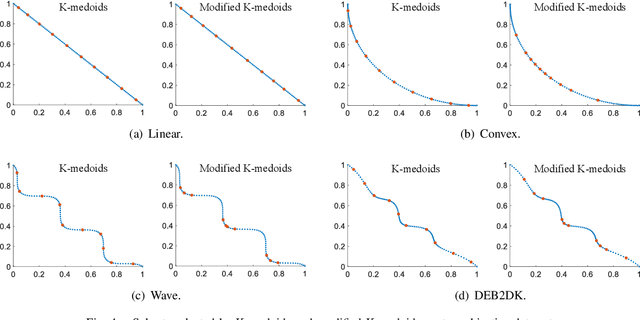
Subset selection is an important component in evolutionary multiobjective optimization (EMO) algorithms. Clustering, as a classic method to group similar data points together, has been used for subset selection in some fields. However, clustering-based methods have not been evaluated in the context of subset selection from solution sets obtained by EMO algorithms. In this paper, we first review some classic clustering algorithms. We also point out that another popular subset selection method, i.e., inverted generational distance (IGD)-based subset selection, can be viewed as clustering. Then, we perform a comprehensive experimental study to evaluate the performance of various clustering algorithms in different scenarios. Experimental results are analyzed in detail, and some suggestions about the use of clustering algorithms for subset selection are derived. Additionally, we demonstrate that decision maker's preference can be introduced to clustering-based subset selection.
Hypervolume-Optimal $μ$-Distributions on Line/Plane-based Pareto Fronts in Three Dimensions
Apr 20, 2021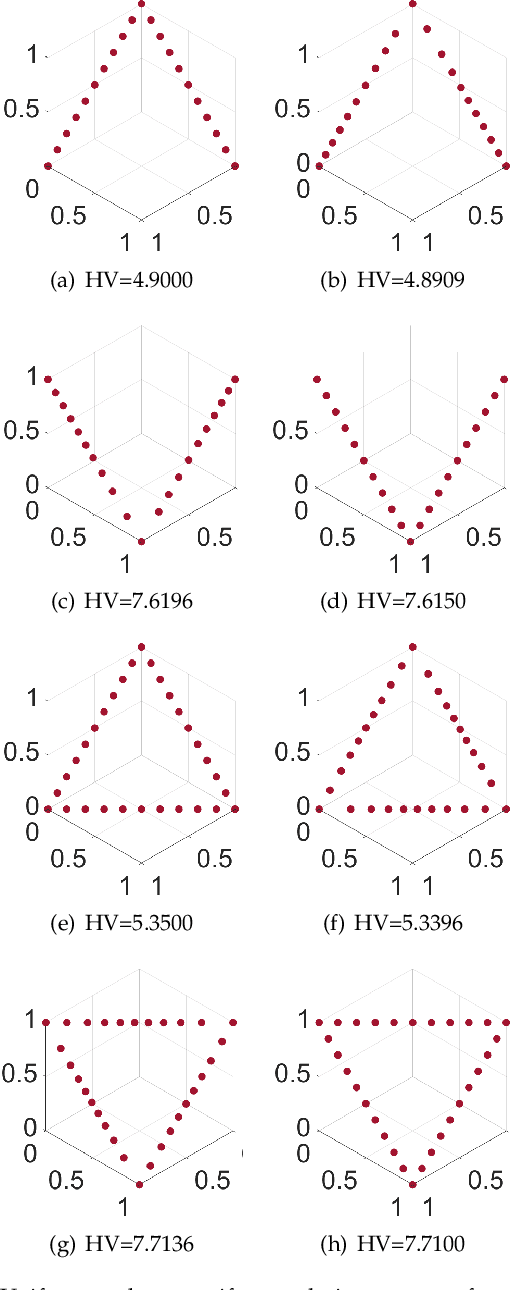
Hypervolume is widely used in the evolutionary multi-objective optimization (EMO) field to evaluate the quality of a solution set. For a solution set with $\mu$ solutions on a Pareto front, a larger hypervolume means a better solution set. Investigating the distribution of the solution set with the largest hypervolume is an important topic in EMO, which is the so-called hypervolume optimal $\mu$-distribution. Theoretical results have shown that the $\mu$ solutions are uniformly distributed on a linear Pareto front in two dimensions. However, the $\mu$ solutions are not always uniformly distributed on a single-line Pareto front in three dimensions. They are only uniform when the single-line Pareto front has one constant objective. In this paper, we further investigate the hypervolume optimal $\mu$-distribution in three dimensions. We consider the line- and plane-based Pareto fronts. For the line-based Pareto fronts, we extend the single-line Pareto front to two-line and three-line Pareto fronts, where each line has one constant objective. For the plane-based Pareto fronts, the linear triangular and inverted triangular Pareto fronts are considered. First, we show that the $\mu$ solutions are not always uniformly distributed on the line-based Pareto fronts. The uniformity depends on how the lines are combined. Then, we show that a uniform solution set on the plane-based Pareto front is not always optimal for hypervolume maximization. It is locally optimal with respect to a $(\mu+1)$ selection scheme. Our results can help researchers in the community to better understand and utilize the hypervolume indicator.