 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeleoperated Omni-directional Dual Arm Mobile Manipulation Robotic System with Shared Control for Retail Store
Feb 27, 2026The swiftly expanding retail sector is increasingly adopting autonomous mobile robots empowered by artificial intelligence and machine learning algorithms to gain an edge in the competitive market. However, these autonomous robots encounter challenges in adapting to the dynamic nature of retail products, often struggling to operate autonomously in novel situations. In this study, we introduce an omni-directional dual-arm mobile robot specifically tailored for use in retail environments. Additionally, we propose a tele-operation method that enables shared control between the robot and a human operator. This approach utilizes a Virtual Reality (VR) motion capture system to capture the operator's commands, which are then transmitted to the robot located remotely in a retail setting. Furthermore, the robot is equipped with heterogeneous grippers on both manipulators, facilitating the handling of a wide range of items. We validate the efficacy of the proposed system through testing in a mockup of retail environment, demonstrating its ability to manipulate various commonly encountered retail items using both single and dual-arm coordinated manipulation techniques.
* This work has been accepted for publication in the Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC 2024). $©$ IEEE. The final version is available via IEEE Xplore
An Efficient Method for Accurate Pose Estimation and Error Correction of Cuboidal Objects
May 08, 2025The proposed system outlined in this paper is a solution to a use case that requires the autonomous picking of cuboidal objects from an organized or unorganized pile with high precision. This paper presents an efficient method for precise pose estimation of cuboid-shaped objects, which aims to reduce errors in target pose in a time-efficient manner. Typical pose estimation methods like global point cloud registrations are prone to minor pose errors for which local registration algorithms are generally used to improve pose accuracy. However, due to the execution time overhead and uncertainty in the error of the final achieved pose, an alternate, linear time approach is proposed for pose error estimation and correction. This paper presents an overview of the solution followed by a detailed description of individual modules of the proposed algorithm.
Development of On-Ground Hardware In Loop Simulation Facility for Space Robotics
Jun 03, 2023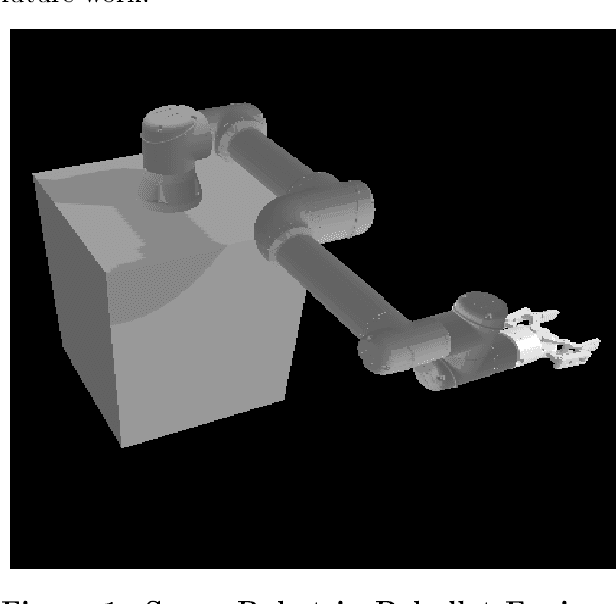
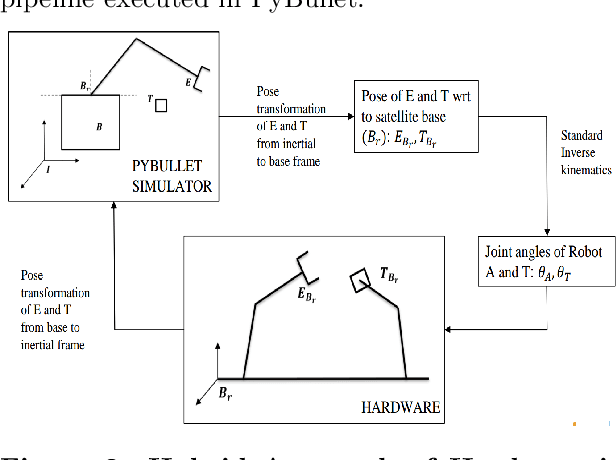
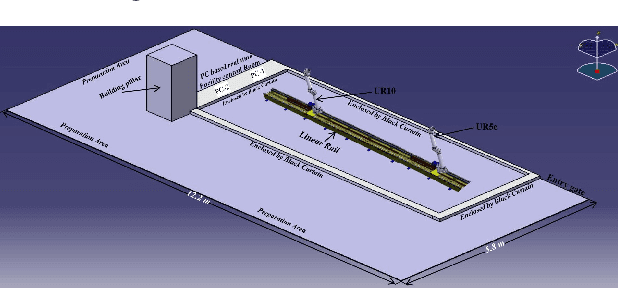
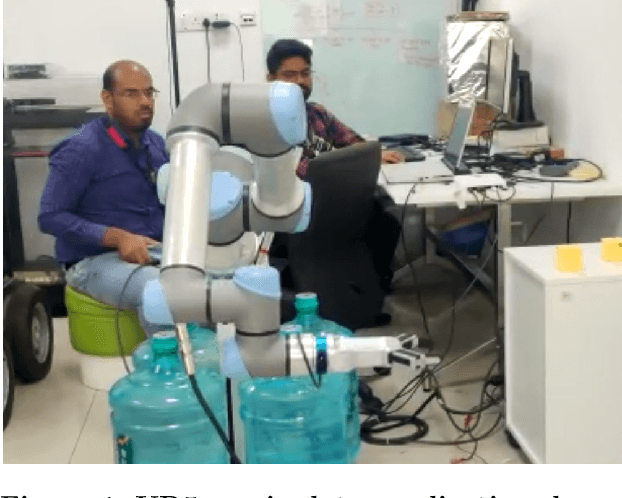
Over a couple of decades, space junk has increased rapidly, which has caused significant threats to the LEO operation satellites. An Active Debris Removal $(ADR)$ concept continuously evolves for space junk removal. One of the ADR methods is Space Robotics, whose function is to chase, capture and de-orbit the space junk. This paper presents the development of an on-ground space robotics facility in the TCS Research for on-orbit servicing $(OOS)$ like refueling and debris capture experiments. A Hardware in Loop Simulation (HILS) system will be used for integrated system development, testing, and demonstration of on-orbit docking mechanisms. The HiLS test facility of TCS Research Lab will use two URs in which one UR is attached to the RG2 gripper, and the other is attached to a force-torque sensor and with a scaled mock-up model. The first UR5 will be mounted on a 7-axis linear rail and contain the docking probe. First, UR5 with a suitable gripper has to interface its control boxes. The grasping algorithm was run through the ROS interface line to demonstrate and validate the on-orbit operations. The manipulator will be mounted with LIDAR and a camera to visualize the mock-up model, find the target model's pose and rotational velocity estimation, and a gripper that will move relative to the target model. The other manipulator has the UR10 control, providing rotational and random motion to the mockup, enabling a dynamic simulator fed by force-torque data. The dynamic simulator is fed up with the orbit propagator, which will provide the orbiting environment to the target model. For the simulation of the docking and grasping of the target model, a linear rail of a 6m setup is still in the procurement process. Once reaching proximity, the grasping algorithm will be launched to capture the target model after reading the random motion of the mock-up model.
UAV-miniUGV Hybrid System for Hidden Area Exploration and Manipulation
Sep 23, 2022
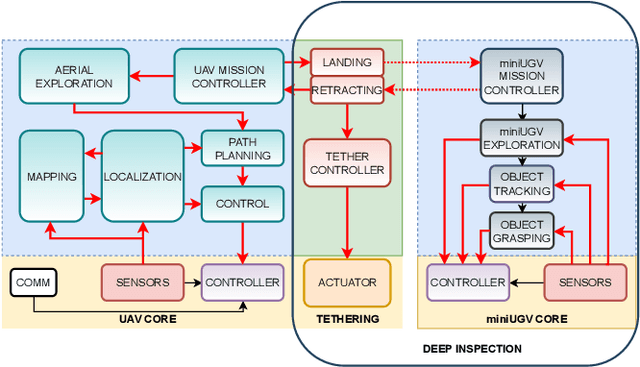
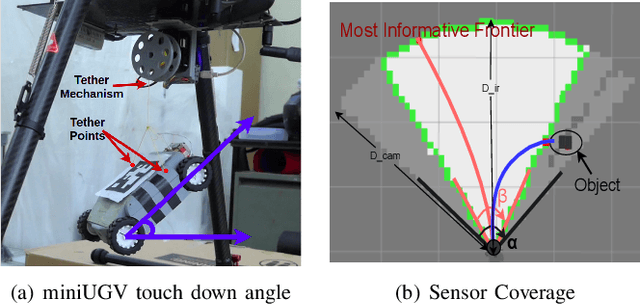
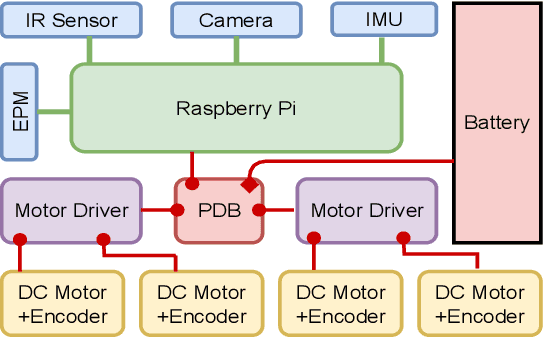
We propose a novel hybrid system (both hardware and software) of an Unmanned Aerial Vehicle (UAV) carrying a miniature Unmanned Ground Vehicle (miniUGV) to perform a complex search and manipulation task. This system leverages heterogeneous robots to accomplish a task that cannot be done using a single robot system. It enables the UAV to explore a hidden space with a narrow opening through which the miniUGV can easily enter and escape. The hidden space is assumed to be navigable for the miniUGV. The miniUGV uses Infrared (IR) sensors and a monocular camera to search for an object in the hidden space. The proposed system takes advantage of a wider field of view (fov) of the camera as well as the stochastic nature of the object detection algorithms to guide the miniUGV in the hidden space to find the object. Upon finding the object the miniUGV grabs it using visual servoing and then returns back to its start point from where the UAV retracts it back and transports the object to a safe place. In case there is no object found in the hidden space, UAV continues the aerial search. The tethered miniUGV gives the UAV an ability to act beyond its reach and perform a search and manipulation task which was not possible before for any of the robots individually. The system has a wide range of applications and we have demonstrated its feasibility through repetitive experiments.
Design and Analysis of Cold Gas Thruster to De-Orbit the PSLV Debris
Aug 07, 2022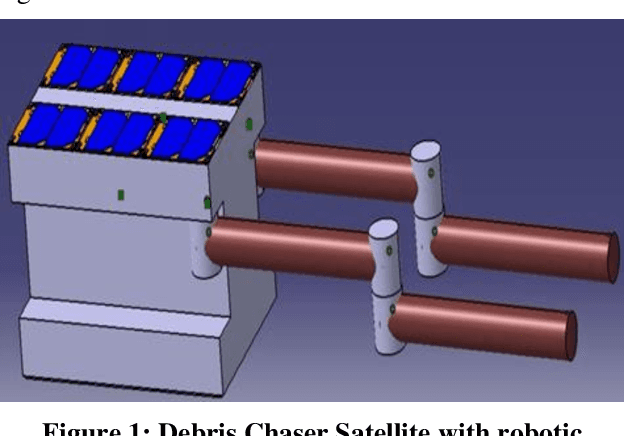
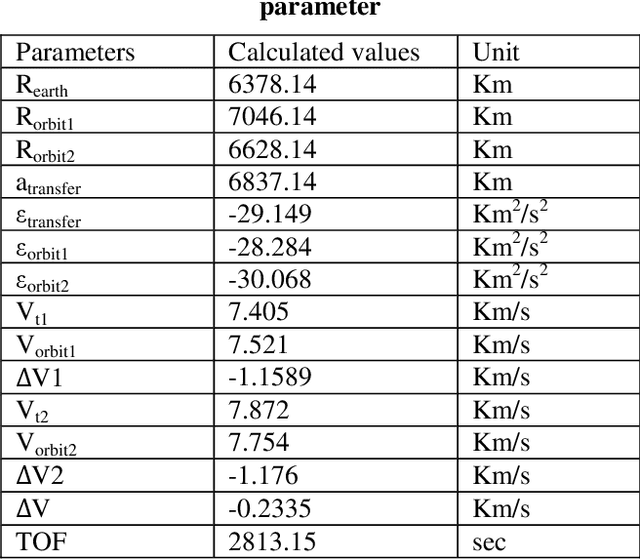

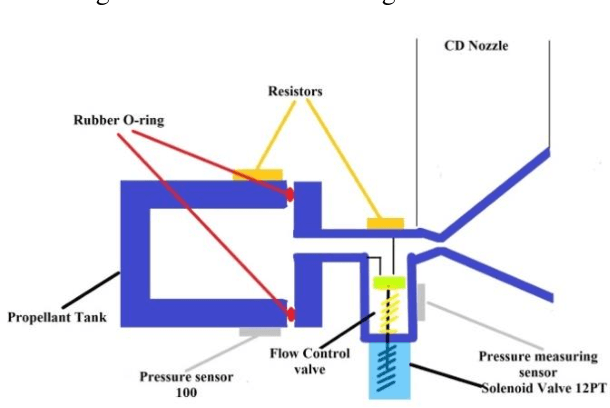
Today\'s world of space\'s primary concern is the uncontrolled growth of space debris and its probability of collision with spacecraft, particularly in the low earth orbit (LEO) regions. This paper is aimed to design an optimized micro-propulsion system, Cold Gas Thruster, to de-orbit the PSLV debris from 668km to 250 km height after capturing process. The propulsion system mainly consists of a storage tank, pipes, control valves, and a convergent-divergent nozzle. The paper gives an idea of the design of each component based on a continuous iterative process until the design thrust requirements are met. All the components are designed in the CATIA V5, and the structural analysis is done in the ANSYS tool for each component where our cylinder tank can withstand the high hoop stress generated on its wall of it. And flow analysis is done by using the K-$\epsilon$ turbulence model for the CD nozzle, which provides the required thrust to de-orbit PSLV from a higher orbit to a lower orbit, after which the air drag will be enough to bring back to earth\'s atmosphere and burn it. Hohmann\'s orbit transfer method has been used to de-orbit the PSLV space debris, and it has been simulated by STK tools. And the result shows that our optimized designed thruster generates enough thrust to de-orbit the PSLV debris to a very low orbit.
Design of Low Thrust Controlled Maneuvers to Chase and De-orbit the Space Debris
Apr 01, 2022
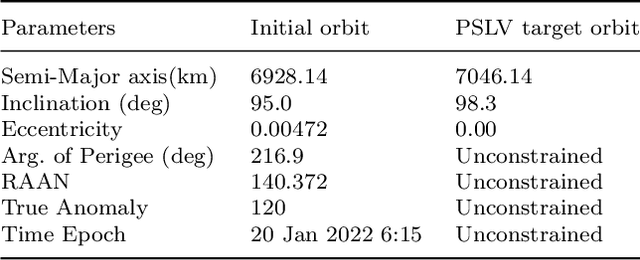
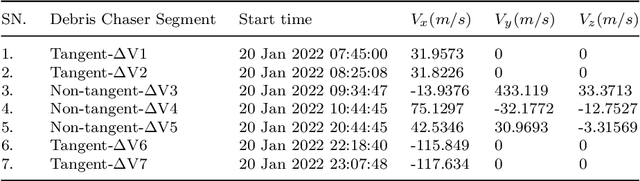
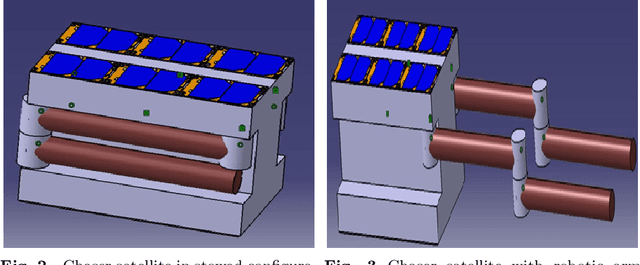
Over the several decades, the space debris at LEO has grown rapidly which had caused a serious threat to the operating satellite in an orbit. To avoid the risk of collision and protect the LEO environment, the space robotics ADR concept has been continuously developed for over a decade to chase, capture, and deorbit space debris. This paper presents the designed small satellite with dual robotic manipulators. The small satellite is designed based on CubeSat standards, which uses commercially available products in the market. In this paper, an approach is detailed for designing the controlled chase and deorbit maneuver for a small satellite equipped with an RCS thruster. The maneuvers are comprised of two phases, a. bringing the chaser satellite to the debris orbit and accelerating it to close proximity of 1m to the debris object by using the low thrust RCS thruster, and b. Once captured, controlled deorbiting it to 250 km of altitude. A Hohmann transfer concept is used to move our chaser satellite from the lower orbit to the debris orbit by two impulsive burns. A number of the scenarios are simulated, where one or more orbital elements are adjusted. For more than one orbital elements adjustment, the DAG law and the Q law are utilized. These laws synthesize the three direction thrusts to the single thrust force for the controlled maneuver. The $\Delta$V requirement at each maneuver is determined by using the performance parameters of the RCS thruster intended for a small satellite. The results show that, for long term simulation of a chaser satellite maneuver to debris object, an optimum DAG law is most suitable than the Q law, as it can handle the singularity behavior of the orbital elements caused due by adjustment of one or more elements more efficiently.
Attitude and In-orbit Residual Magnetic Moment Estimation of Small Satellites Using only Magnetometer
Jul 20, 2021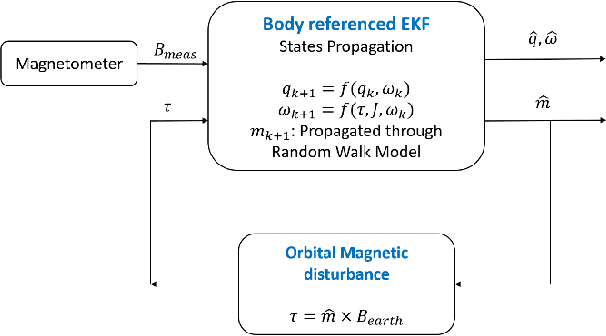
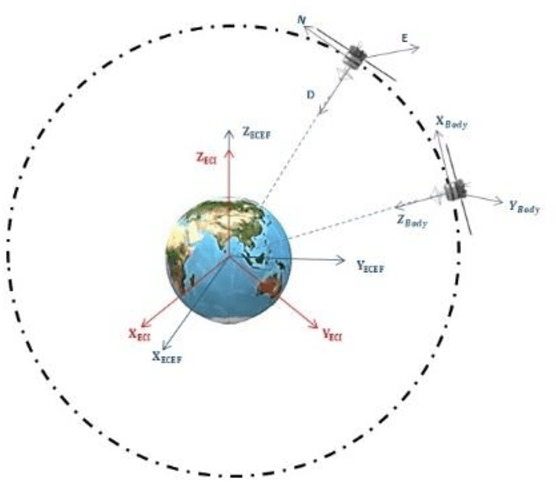
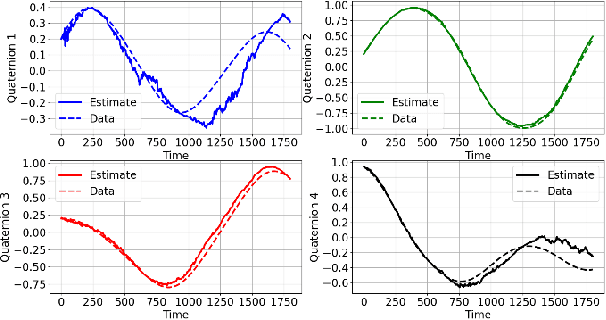
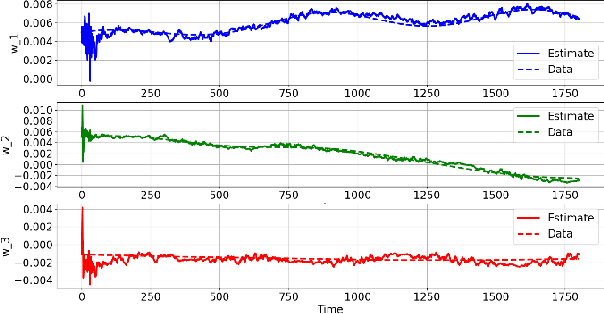
Attitude estimation or determination is a fundamental task for satellites to remain effectively operational. This task is furthermore complicated on small satellites by the limited space and computational power available on-board. This, coupled with a usually low budget, restricts small satellites from using high precision sensors for its especially important task of attitude estimation. On top of this, small satellites, on account of their size and weight, are comparatively more sensitive to environmental or orbital disturbances as compared to their larger counterparts. Magnetic disturbance forms the major contributor to orbital disturbances on small satellites in Lower Earth Orbits (LEO). This magnetic disturbance depends on the Residual Magnetic Moment (RMM) of the satellite itself, which for higher accuracy should be determined in real-time. This paper presents a method for in-orbit estimation of the satellite magnetic dipole using a Random Walk Model in order to circumnavigate the inaccuracy arising due to unknown orbital magnetic disturbances. It is also ensured that the dipole as well as attitude estimation of the satellite is done using only a magnetometer as the sensor.
Constellation Design of Remote Sensing Small Satellite for Infrastructure Monitoring in India
Jul 20, 2021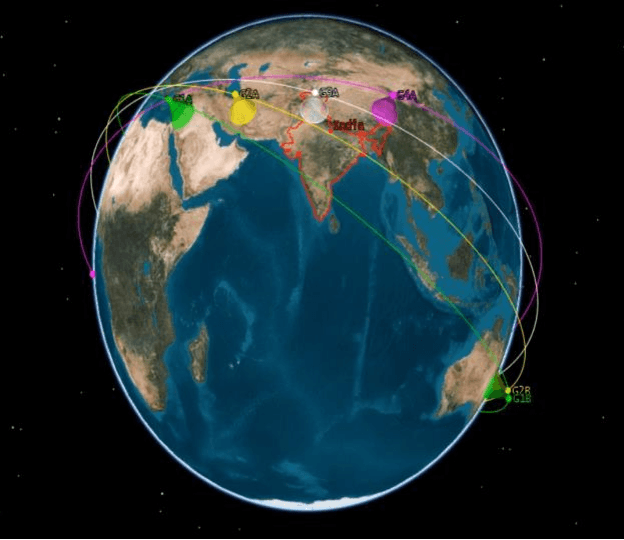
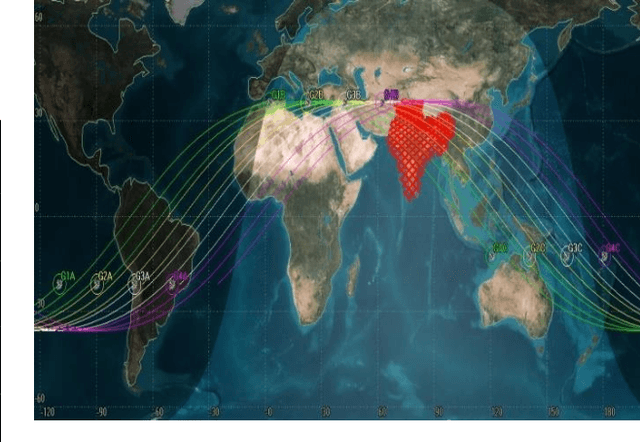
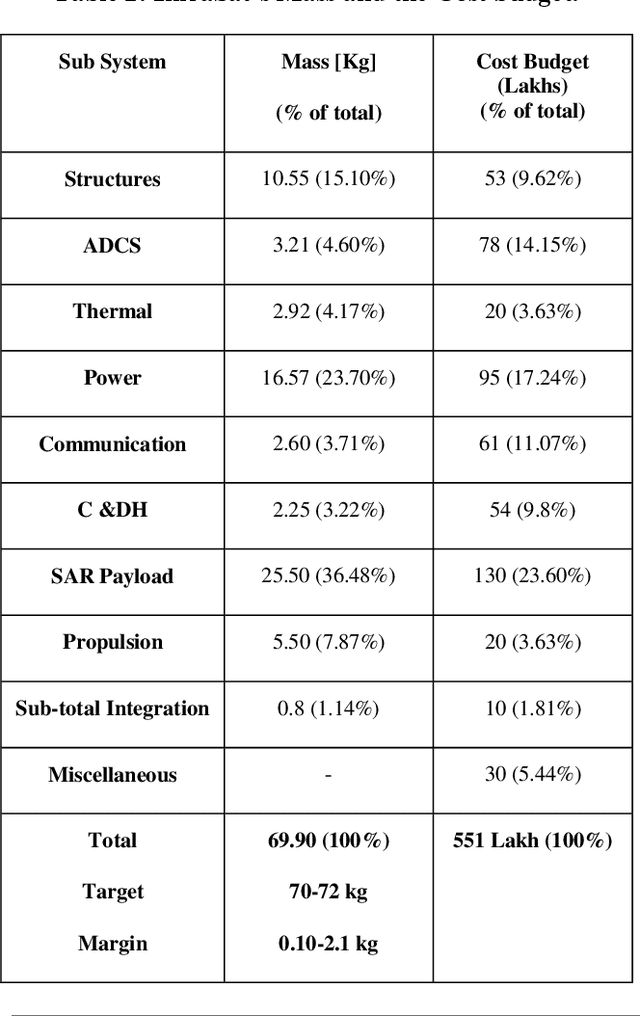
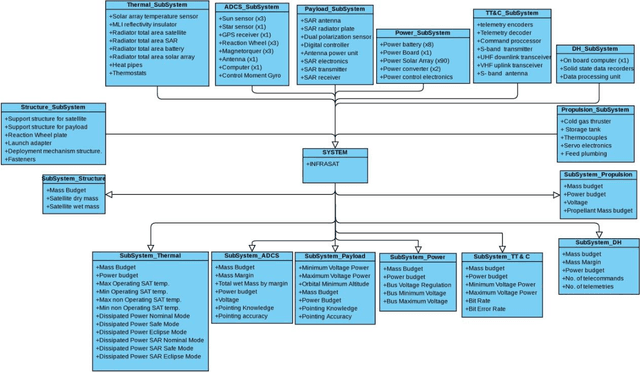
A constellation of remote sensing small satellite system has been developed for infrastructure monitoring in India by using SAR Payload. The LEO constellation of the small satellites is designed in a way, which can cover the entire footprint of India. Since India lies a little above the equatorial region, the orbital parameters are adjusted in a way that inclination of 36 degrees and RAAN varies from 70-130 degrees at a height of 600 km has been considered. A total number of 4 orbital planes are designed in which each orbital plane consisting 3 small satellites with 120-degrees true anomaly separation. Each satellite is capable of taking multiple look images with the minimum resolution of 1 meter per pixel and swath width of 10 km approx. The multiple look images captured by the SAR payload help in continuous infrastructure monitoring of our interested footprint area in India. Each small satellite is equipped with a communication payload that uses X-band and VHF antenna, whereas the TT&C will use a high data-rate S-band transmitter. The paper presents only a coverage metrics analysis method of our designed constellation for our India footprint by considering the important metrics like revisit time, response time, and coverage efficiency. The result shows that the average revisits time for our constellation ranges from about 15- 35 min which is less than an hour and the average response time for this iteratively designed constellation ranges from about 25-120 min along with hundred percent coverage efficiency most of the time. Finally, it was concluded that each satellite has 70kg of total mass and costs around $ 0.75M to develop.
Model Based Control of Commercial-Off-TheShelf (COTS) Unmanned Rotorcraft for BrickWall Construction
Mar 23, 2021
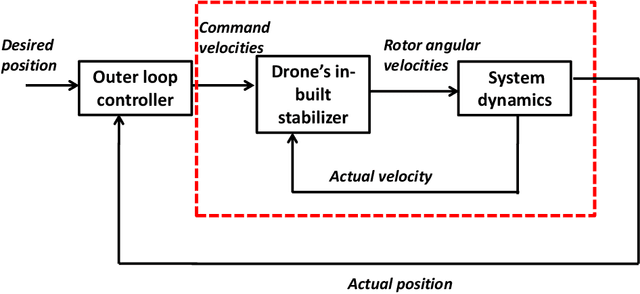

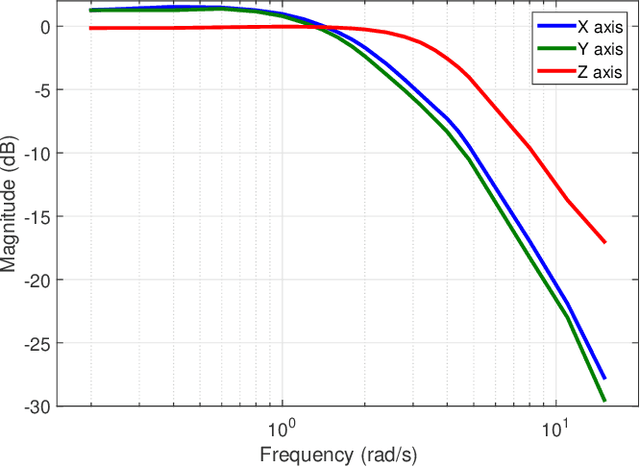
This work proposes a systematic framework for modelling and controller design of a Commercial-Off-The Shelf (COTS) unmanned rotorcraft using control theory and principles, for brick wall construction. With point to point navigation as the primary application, command velocities in the three axes of the Unmanned Aerial Vehicle (UAV) are considered as inputs of the system while its actual velocities are system outputs. Using the sine and step response data acquired from a Hardware-in-Loop (HiL) test simulator, the considered system was modelled in individual axes with the help of the proposed framework. This model was employed for controller design where a sliding mode controller was chosen to satisfy certain requirements of the application like robustness, flexibility and accuracy. The model was validated using step response data and produced a deviation of only 9%. Finally, the controller results from field test showed fine control up to 8 cms accuracy. Sliding Mode Control (SMC) was also compared with a linear controller derived from iterative experimentations and seen to perform better than the latter in terms of accuracy, and robustness to parametric variations and wind disturbances.
Synthesis of a Six-Bar Gripper Mechanism for Aerial Grasping
Dec 12, 2020
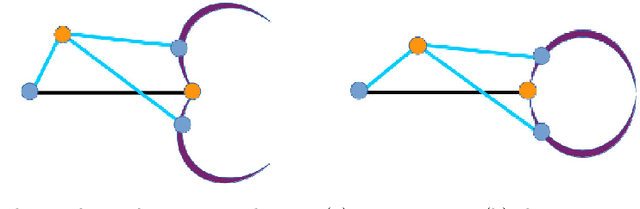
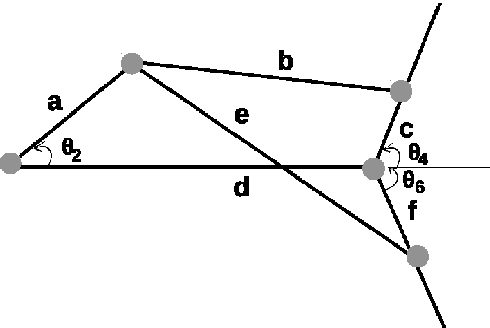
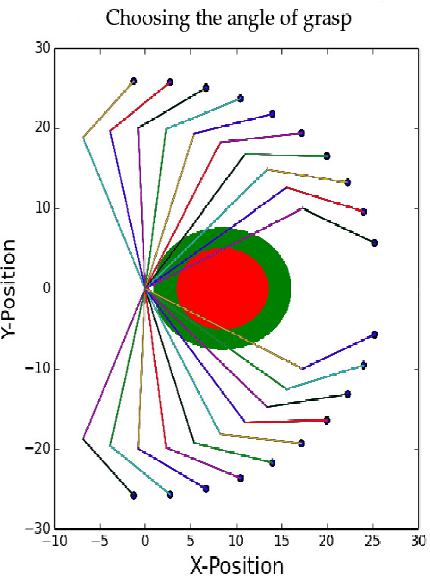
In this paper, a 1-DoF gripper mechanism has been synthesized for the type of mechanism, number of links and joints, and the dimensions of length, width and thickness of links. The type synthesis is done by selecting the proper class of mechanism from Reuleaux's six classes of mechanisms. The number synthesis is done by using an algebraic method. The dimensions of the linkages are found using the geometric programming method. The gripper is then modeled in a computer aided design software and then fabricated using an additive manufacturing technique. Finally the gripper mechanism with DC motor as an actuator is mounted on an Unmanned Aerial Vehicle (UAV) to grip a spherical object moving in space. This work is related to a task in challenge 1 of Mohamed Bin Zayed International Robotics Challenge (MBZIRC)-2020.