 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft is Safe: Human-Robot Interaction for Soft Robots
Feb 03, 2025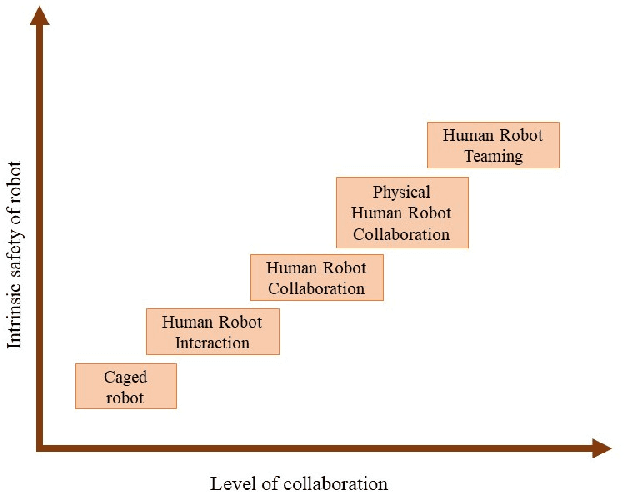
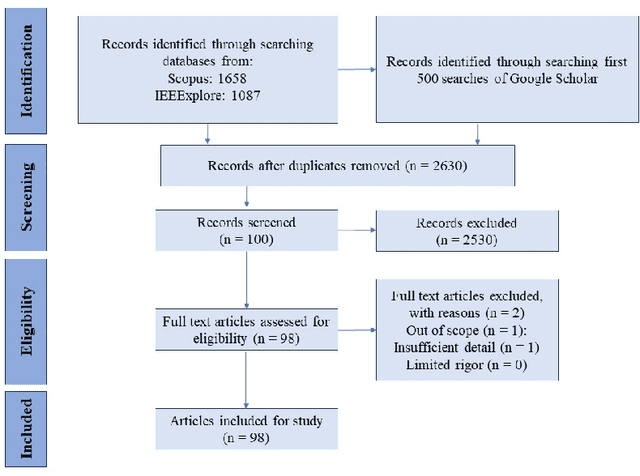
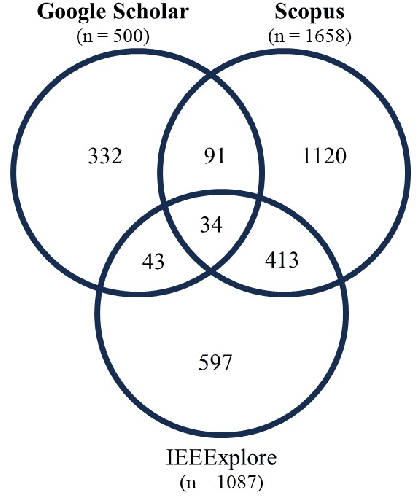
With the presence of robots increasing in the society, the need for interacting with robots is becoming necessary. The field of Human-Robot Interaction (HRI) has emerged important since more repetitive and tiresome jobs are being done by robots. In the recent times, the field of soft robotics has seen a boom in the field of research and commercialization. The Industry 5.0 focuses on human robot collaboration which also spurs the field of soft robotics. However the HRI for soft robotics is still in the nascent stage. In this work we review and then discuss how HRI is done for soft robots. We first discuss the control, design, materials and manufacturing of soft robots. This will provide an understanding of what is being interacted with. Then we discuss about the various input and output modalities that are used in HRI. The applications where the HRI for soft robots are found in the literature are discussed in detail. Then the limitations of HRI for soft robots and various research opportunities that exist in this field are discussed in detail. It is concluded that there is a huge scope for development for HRI for soft robots.
Heads Up eXperience (HUX): Always-On AI Companion for Human Computer Environment Interaction
Jul 28, 2024



While current personal smart devices excel in digital domains, they fall short in assisting users during human environment interaction. This paper proposes Heads Up eXperience (HUX), an AI system designed to bridge this gap, serving as a constant companion across the extended reality (XR) environments. By tracking the user's eye gaze, analyzing the surrounding environment, and interpreting verbal contexts, the system captures and enhances multi-modal data, providing holistic context interpretation and memory storage in real-time task specific situations. This comprehensive approach enables more natural, empathetic and intelligent interactions between the user and HUX AI, paving the path for human computer environment interaction. Intended for deployment in smart glasses and extended reality headsets, HUX AI aims to become a personal and useful AI companion for daily life. By integrating digital assistance with enhanced physical world interactions, this technology has the potential to revolutionize human-AI collaboration in both personal and professional spheres paving the way for the future of personal smart devices.
Serpentine Synergy: Design and Fabrication of a Dual Soft Continuum Manipulator and Soft Snake Robot
Jul 05, 2024This work presents a soft continuum robot (SCR) that can be used as a soft continuum manipulator (SCM) and a soft snake robot (SSR). This is achieved using expanded polyethylene foam (EPE) modules as the soft material. In situations like post-earthquake search operations, these dual-purpose robots could play a vital role. The soft continuum manipulator with a camera attached to the tip can manually search for survivors in the debris. On the other hand, the soft snake robot can be made by attaching an active wheel to the soft continuum manipulator. This mobile robot can reach places humans cannot and gather information about survivors. This work presents the design, fabrication, and experimental validation of the dual soft continuum robot.
Optimal Kinematic Design of a Robotic Lizard using Four-Bar and Five-Bar Mechanisms
Aug 16, 2023



Designing a mechanism to mimic the motion of a common house gecko is the objective of this work. The body of the robot is designed using four five-bar mechanisms (2-RRRRR and 2-RRPRR) and the leg is designed using four four-bar mechanisms. The 2-RRRRR five-bar mechanisms form the head and tail of the robotic lizard. The 2-RRPRR five-bar mechanisms form the left and right sides of the body in the robotic lizard. The four five-bar mechanisms are actuated by only four rotary actuators. Of these, two actuators control the head movements and the other two control the tail movements. The RRPRR five-bar mechanism is controlled by one actuator from the head five-bar mechanism and the other by the tail five-bar mechanism. A tension spring connects each active link to a link in the four bar mechanism. When the robot is actuated, the head, tail and the body moves, and simultaneously each leg moves accordingly. This kind of actuation where the motion transfer occurs from body of the robot to the leg is the novelty in our design. The dimensional synthesis of the robotic lizard is done and presented. Then the forward and inverse kinematics of the mechanism, and configuration space singularities identification for the robot are presented. The gait exhibited by the gecko is studied and then simulated. A computer aided design of the robotic lizard is created and a prototype is made by 3D printing the parts. The prototype is controlled using Arduino UNO as a micro-controller. The experimental results are finally presented based on the gait analysis that was done earlier. The forward walking, and turning motion are done and snapshots are presented.
An Autonomous Hybrid Drone-Rover Vehicle for Weed Removal and Spraying Applications in Agriculture
Aug 09, 2023



The usage of drones and rovers helps to overcome the limitations of traditional agriculture which has been predominantly human-intensive, for carrying out tasks such as removal of weeds and spraying of fertilizers and pesticides. Drones and rovers are helping to realize precision agriculture and farmers with improved monitoring and surveying at affordable costs. Major benefits have come for vertical farming and fields with irrigation canals. However, drones have a limitation of flight time due to payload constraints. Rovers have limitations in vertical farming and obstacles like canals in agricultural fields. To meet the different requirements of multiple terrains and vertical farming in agriculture, we propose an autonomous hybrid drone-rover vehicle that combines the advantages of both rovers and drones. The prototype is described along with experimental results regarding its ability to avoid obstacles, pluck weeds and spray pesticides.
A Simple Robot Selection Criteria After Path Planning Using Wavefront Algorithm
Jul 30, 2023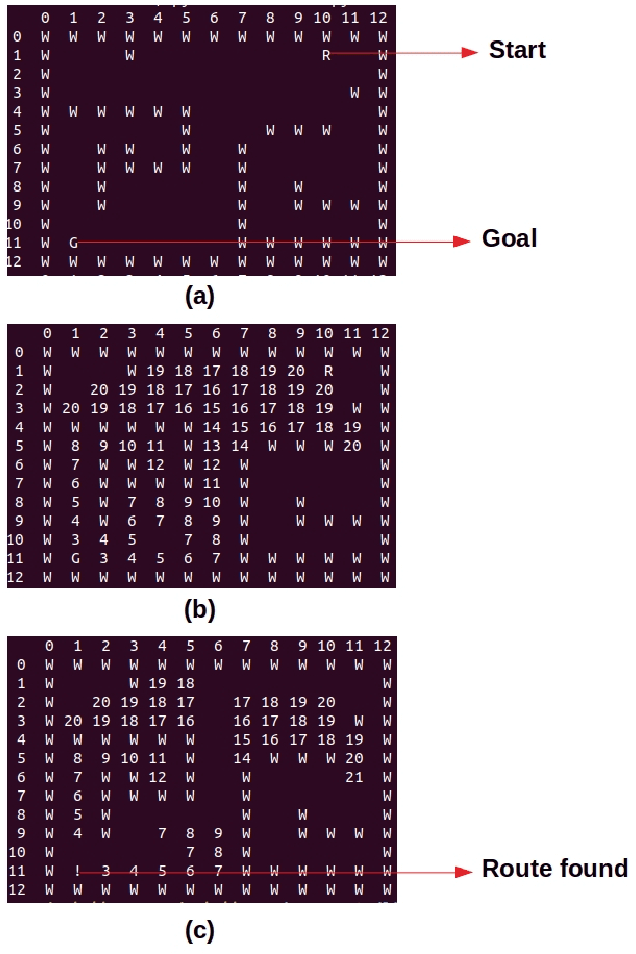
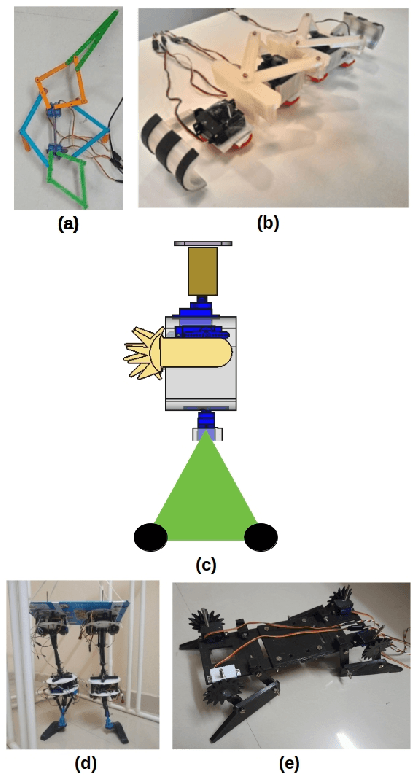
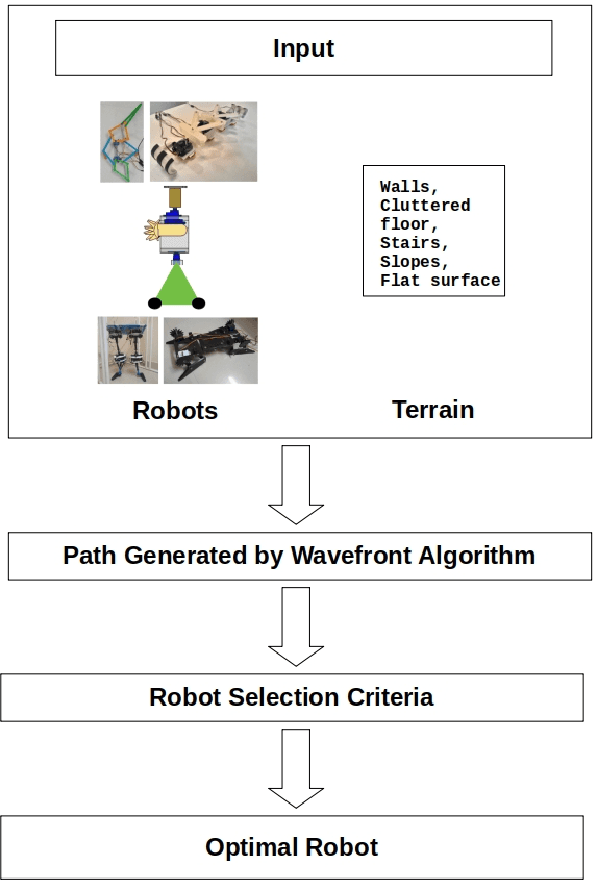
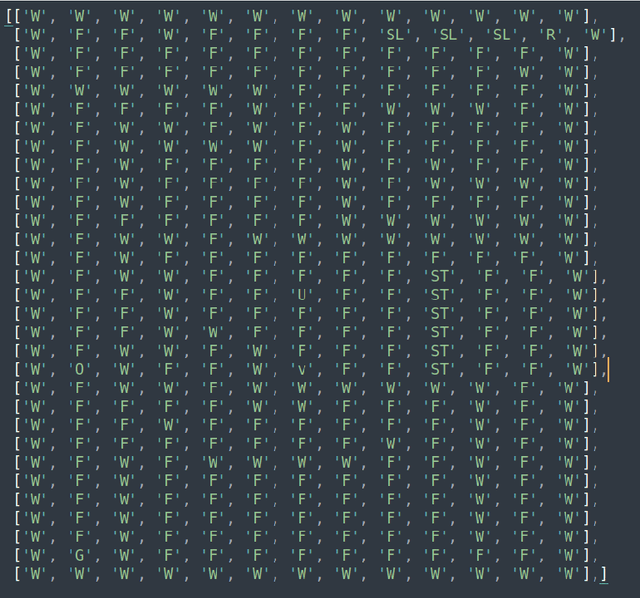
In this work we present a technique to select the best robot for accomplishing a task assuming that the map of the environment is known in advance. To do so, capabilities of the robots are listed and the environments where they can be used are mapped. There are five robots that included for doing the tasks. They are the robotic lizard, half-humanoid, robotic snake, biped and quadruped. Each of these robots are capable of performing certain activities and also they have their own limitations. The process of considering the robot performances and acting based on their limitations is the focus of this work. The wavefront algorithm is used to find the nature of terrain. Based on the terrain a suitable robot is selected from the list of five robots by the wavefront algorithm. Using this robot the mission is accomplished.
Degrees of Freedom Analysis of Mechanisms using the New Zebra Crossing Method
Jan 07, 2022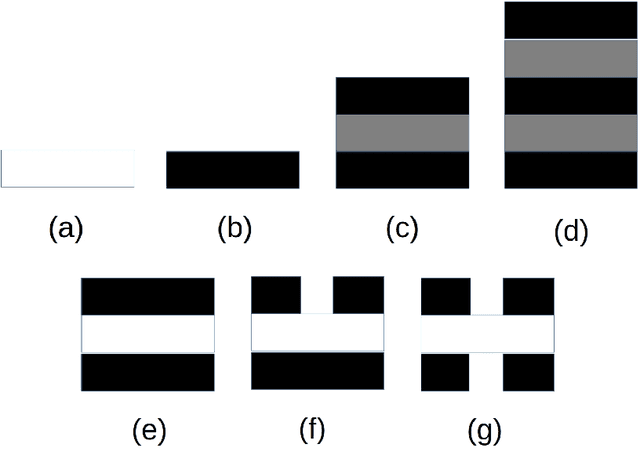
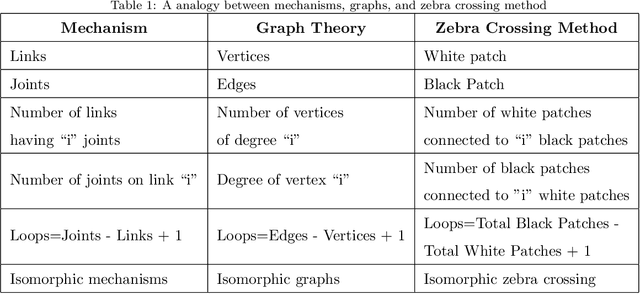


Mobility, which is a basic property for a mechanism has to be analyzed to find the degrees of freedom. A quick method for calculation of degrees of freedom in a mechanism is proposed in this work. The mechanism is represented in a way that resembles a zebra crossing. An algorithm is proposed which is used to determine the mobility from the zebra crossing diagram. This algorithm takes into account the number of patches between the black patches, the number of joints attached to the fixed link and the number of loops in the mechanism. A number of cases have been discussed which fail to give the desired results using the widely used classical Kutzbach-Grubler formula.
Design and Analysis of a Robotic Lizard using Five-Bar Mechanism
Jul 27, 2021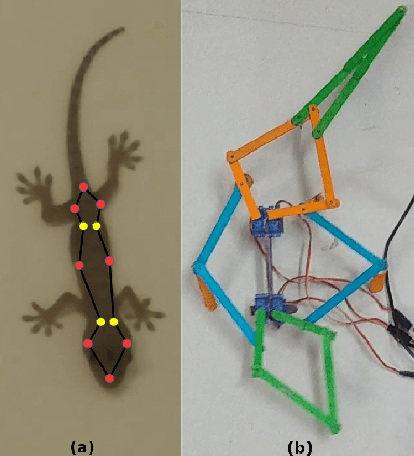
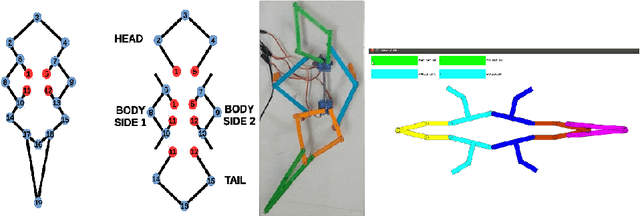
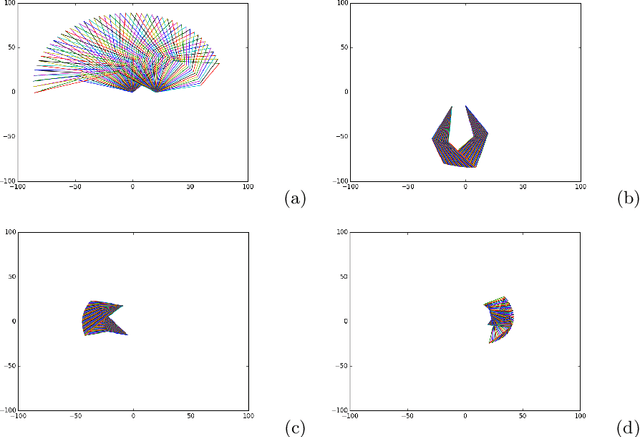
Legged robots are being used to explore rough terrains as they are capable of traversing gaps and obstacles. In this paper, a new mechanism is designed to replicate a robotic lizard using integrated five-bar mechanisms. There are two five bar mechanisms from which two more are formed by connecting the links in a particular order. The legs are attached to the links of the five bar mechanism such that, when the mechanism is actuated, they move the robot forward. Position analysis using vector loop approach has been done for the mechanism. A prototype has been built and controlled using servo motors to verify the robotic lizard mechanism.
* 8 pages, 4 figures, presented during the 4th International and 19th National Conference on Machines and Mechanism (iNaCoMM 2019)
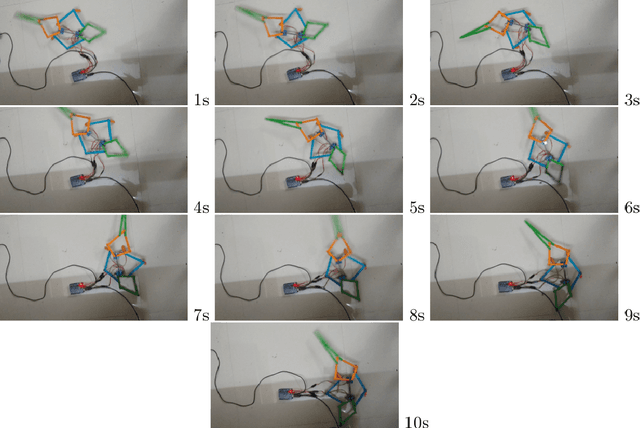
Synthesis of a Six-Bar Gripper Mechanism for Aerial Grasping
Dec 12, 2020
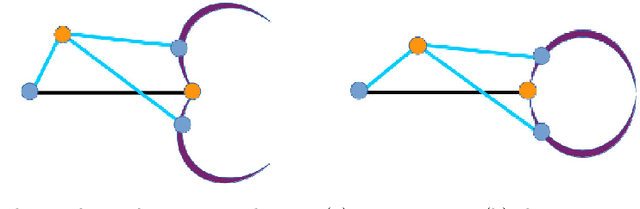
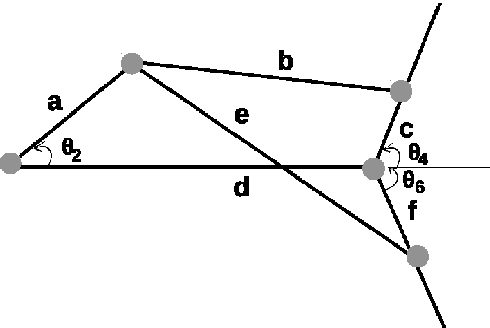
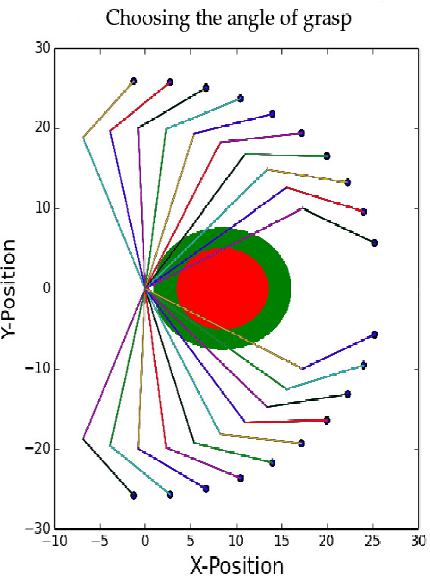
In this paper, a 1-DoF gripper mechanism has been synthesized for the type of mechanism, number of links and joints, and the dimensions of length, width and thickness of links. The type synthesis is done by selecting the proper class of mechanism from Reuleaux's six classes of mechanisms. The number synthesis is done by using an algebraic method. The dimensions of the linkages are found using the geometric programming method. The gripper is then modeled in a computer aided design software and then fabricated using an additive manufacturing technique. Finally the gripper mechanism with DC motor as an actuator is mounted on an Unmanned Aerial Vehicle (UAV) to grip a spherical object moving in space. This work is related to a task in challenge 1 of Mohamed Bin Zayed International Robotics Challenge (MBZIRC)-2020.