 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesis of a Six-Bar Gripper Mechanism for Aerial Grasping
Paper and Code
Dec 12, 2020
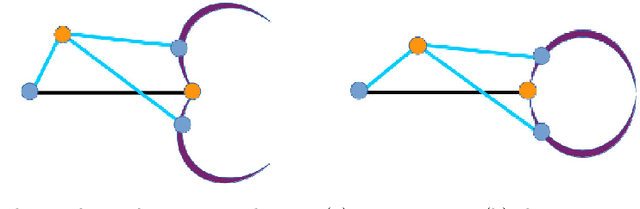
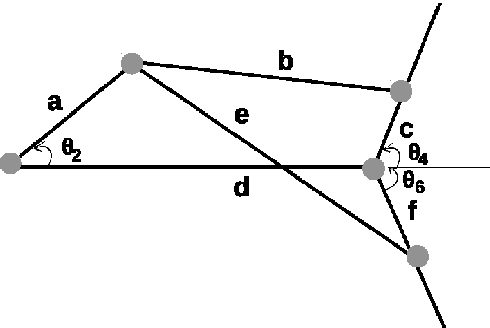
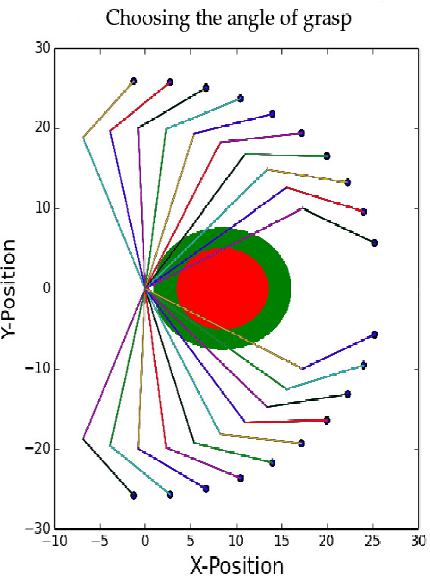
In this paper, a 1-DoF gripper mechanism has been synthesized for the type of mechanism, number of links and joints, and the dimensions of length, width and thickness of links. The type synthesis is done by selecting the proper class of mechanism from Reuleaux's six classes of mechanisms. The number synthesis is done by using an algebraic method. The dimensions of the linkages are found using the geometric programming method. The gripper is then modeled in a computer aided design software and then fabricated using an additive manufacturing technique. Finally the gripper mechanism with DC motor as an actuator is mounted on an Unmanned Aerial Vehicle (UAV) to grip a spherical object moving in space. This work is related to a task in challenge 1 of Mohamed Bin Zayed International Robotics Challenge (MBZIRC)-2020.