 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Kinematic Design of a Robotic Lizard using Four-Bar and Five-Bar Mechanisms
Aug 16, 2023



Designing a mechanism to mimic the motion of a common house gecko is the objective of this work. The body of the robot is designed using four five-bar mechanisms (2-RRRRR and 2-RRPRR) and the leg is designed using four four-bar mechanisms. The 2-RRRRR five-bar mechanisms form the head and tail of the robotic lizard. The 2-RRPRR five-bar mechanisms form the left and right sides of the body in the robotic lizard. The four five-bar mechanisms are actuated by only four rotary actuators. Of these, two actuators control the head movements and the other two control the tail movements. The RRPRR five-bar mechanism is controlled by one actuator from the head five-bar mechanism and the other by the tail five-bar mechanism. A tension spring connects each active link to a link in the four bar mechanism. When the robot is actuated, the head, tail and the body moves, and simultaneously each leg moves accordingly. This kind of actuation where the motion transfer occurs from body of the robot to the leg is the novelty in our design. The dimensional synthesis of the robotic lizard is done and presented. Then the forward and inverse kinematics of the mechanism, and configuration space singularities identification for the robot are presented. The gait exhibited by the gecko is studied and then simulated. A computer aided design of the robotic lizard is created and a prototype is made by 3D printing the parts. The prototype is controlled using Arduino UNO as a micro-controller. The experimental results are finally presented based on the gait analysis that was done earlier. The forward walking, and turning motion are done and snapshots are presented.
ME-CapsNet: A Multi-Enhanced Capsule Networks with Routing Mechanism
Mar 31, 2022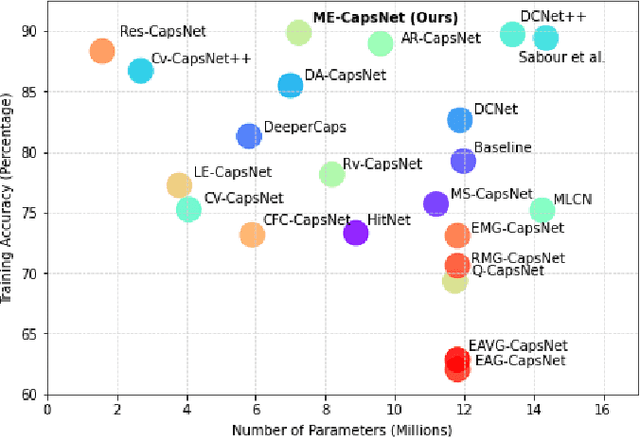

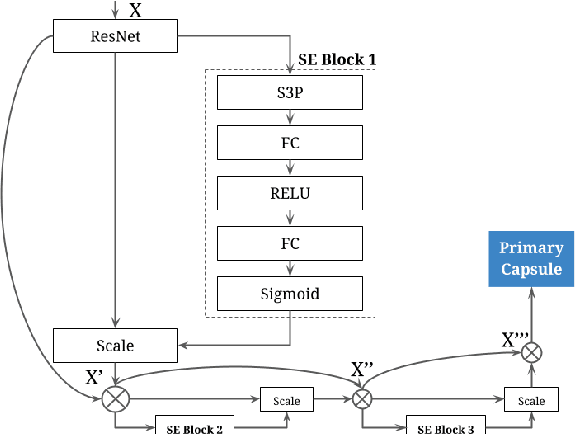
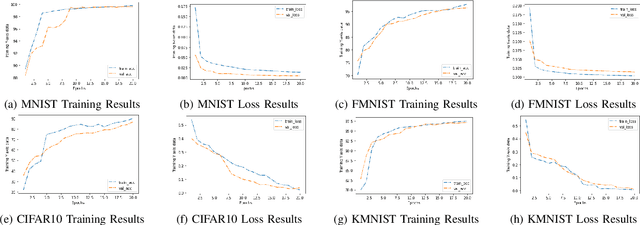
Convolutional Neural Networks need the construction of informative features, which are determined by channel-wise and spatial-wise information at the network's layers. In this research, we focus on bringing in a novel solution that uses sophisticated optimization for enhancing both the spatial and channel components inside each layer's receptive field. Capsule Networks were used to understand the spatial association between features in the feature map. Standalone capsule networks have shown good results on comparatively simple datasets than on complex datasets as a result of the inordinate amount of feature information. Thus, to tackle this issue, we have proposed ME-CapsNet by introducing deeper convolutional layers to extract important features before passing through modules of capsule layers strategically to improve the performance of the network significantly. The deeper convolutional layer includes blocks of Squeeze-Excitation networks which use a stochastic sampling approach for progressively reducing the spatial size thereby dynamically recalibrating the channels by reconstructing their interdependencies without much loss of important feature information. Extensive experimentation was done using commonly used datasets demonstrating the efficiency of the proposed ME-CapsNet, which clearly outperforms various research works by achieving higher accuracy with minimal model complexity in complex datasets.