 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free Platooning of Mobile Robots through a Set-Theoretic Predictive Control Approach
Mar 13, 2024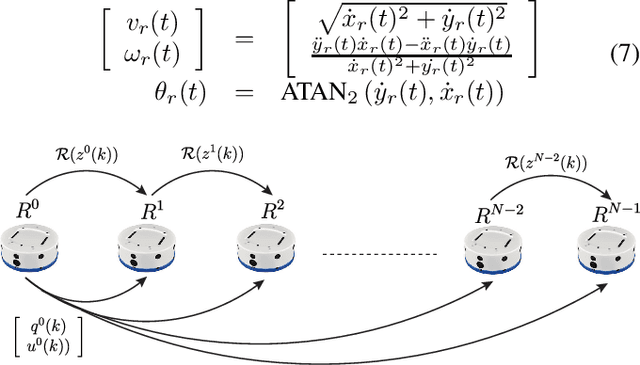
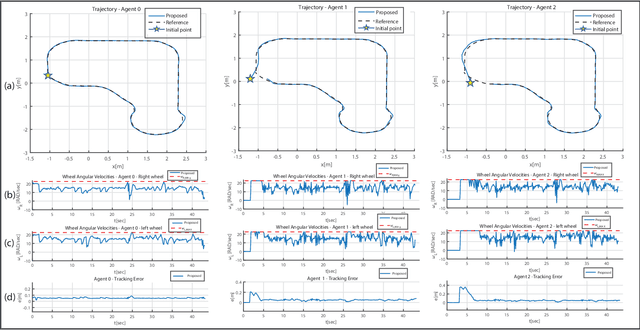
This paper proposes a control solution to achieve collision-free platooning control of input-constrained mobile robots. The platooning policy is based on a leader-follower approach where the leader tracks a reference trajectory while followers track the leader's pose with an inter-agent delay. First, the leader and the follower kinematic models are feedback linearized and the platoon's error dynamics and input constraints characterized. Then, a set-theoretic model predictive control strategy is proposed to address the platooning trajectory tracking control problem. An ad-hoc collision avoidance policy is also proposed to guarantee collision avoidance amongst the agents. Finally, the effectiveness of the proposed control architecture is validated through experiments performed on a formation of Khepera IV differential drive robots
ME-CapsNet: A Multi-Enhanced Capsule Networks with Routing Mechanism
Mar 31, 2022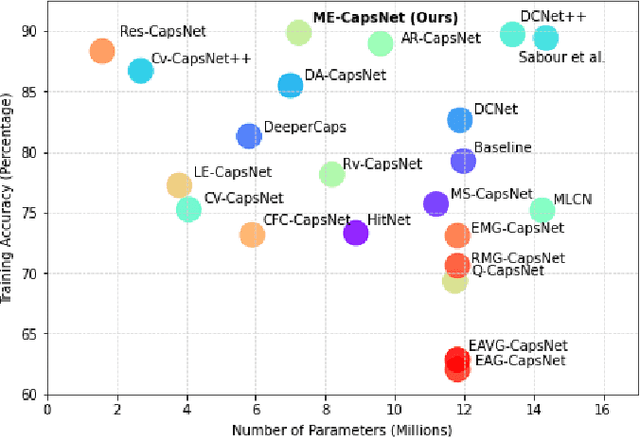

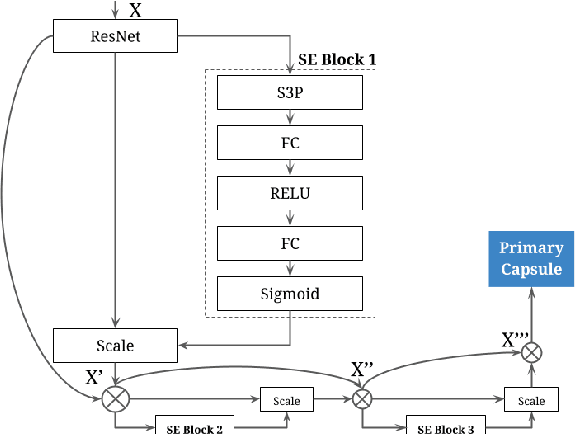
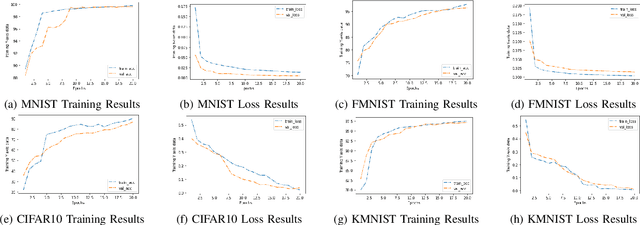
Convolutional Neural Networks need the construction of informative features, which are determined by channel-wise and spatial-wise information at the network's layers. In this research, we focus on bringing in a novel solution that uses sophisticated optimization for enhancing both the spatial and channel components inside each layer's receptive field. Capsule Networks were used to understand the spatial association between features in the feature map. Standalone capsule networks have shown good results on comparatively simple datasets than on complex datasets as a result of the inordinate amount of feature information. Thus, to tackle this issue, we have proposed ME-CapsNet by introducing deeper convolutional layers to extract important features before passing through modules of capsule layers strategically to improve the performance of the network significantly. The deeper convolutional layer includes blocks of Squeeze-Excitation networks which use a stochastic sampling approach for progressively reducing the spatial size thereby dynamically recalibrating the channels by reconstructing their interdependencies without much loss of important feature information. Extensive experimentation was done using commonly used datasets demonstrating the efficiency of the proposed ME-CapsNet, which clearly outperforms various research works by achieving higher accuracy with minimal model complexity in complex datasets.