 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free Platooning of Mobile Robots through a Set-Theoretic Predictive Control Approach
Mar 13, 2024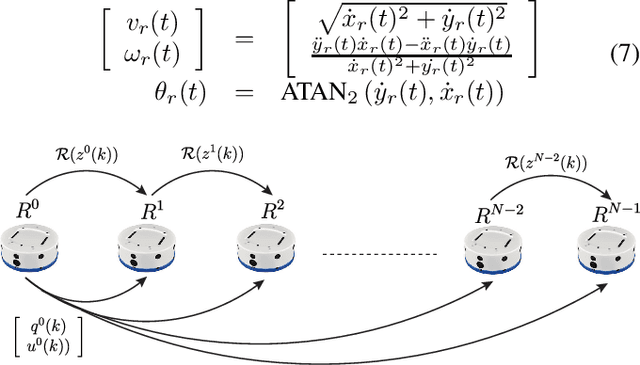
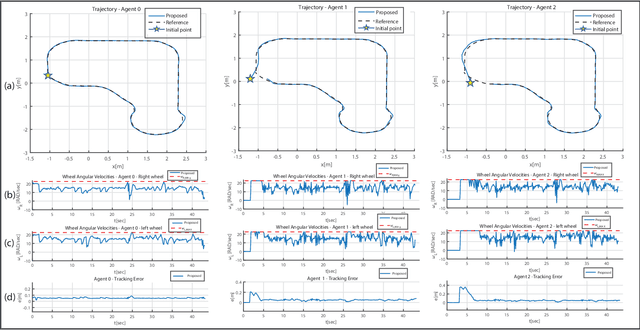
This paper proposes a control solution to achieve collision-free platooning control of input-constrained mobile robots. The platooning policy is based on a leader-follower approach where the leader tracks a reference trajectory while followers track the leader's pose with an inter-agent delay. First, the leader and the follower kinematic models are feedback linearized and the platoon's error dynamics and input constraints characterized. Then, a set-theoretic model predictive control strategy is proposed to address the platooning trajectory tracking control problem. An ad-hoc collision avoidance policy is also proposed to guarantee collision avoidance amongst the agents. Finally, the effectiveness of the proposed control architecture is validated through experiments performed on a formation of Khepera IV differential drive robots