 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple Robot Selection Criteria After Path Planning Using Wavefront Algorithm
Jul 30, 2023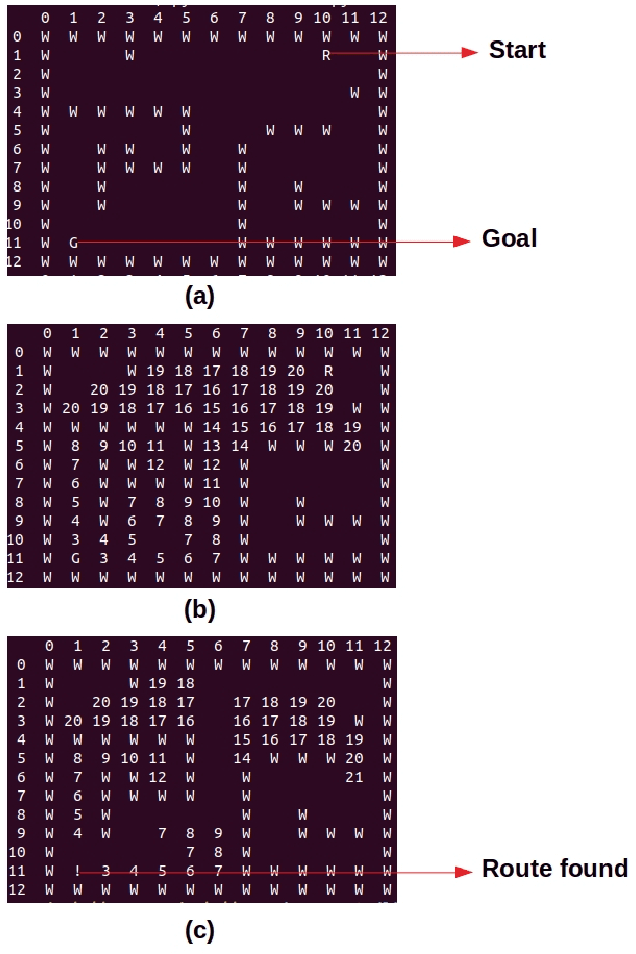
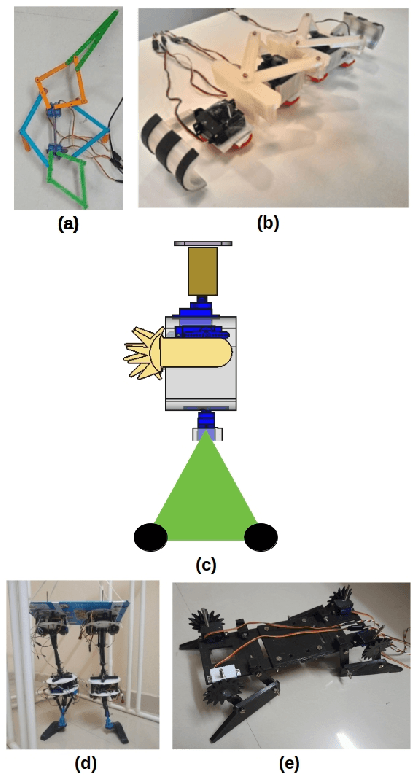
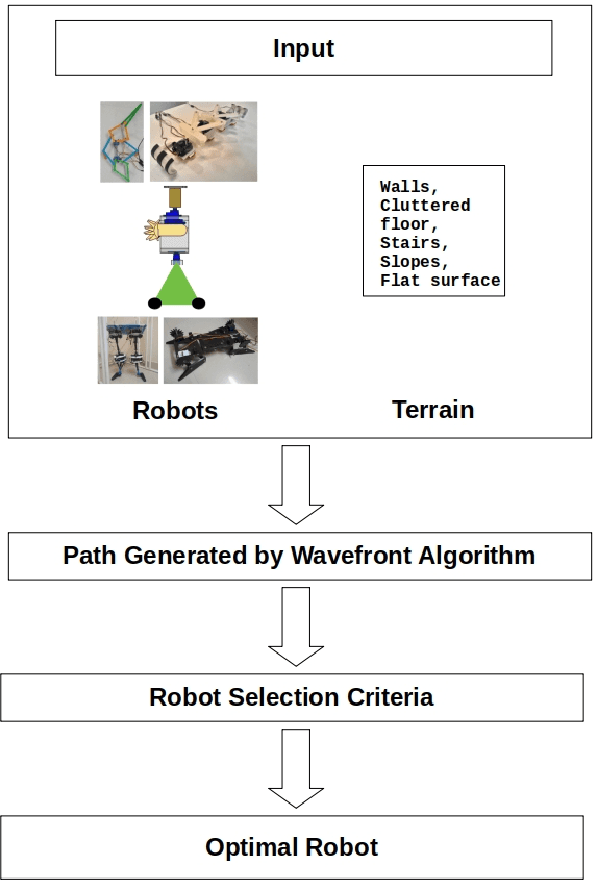
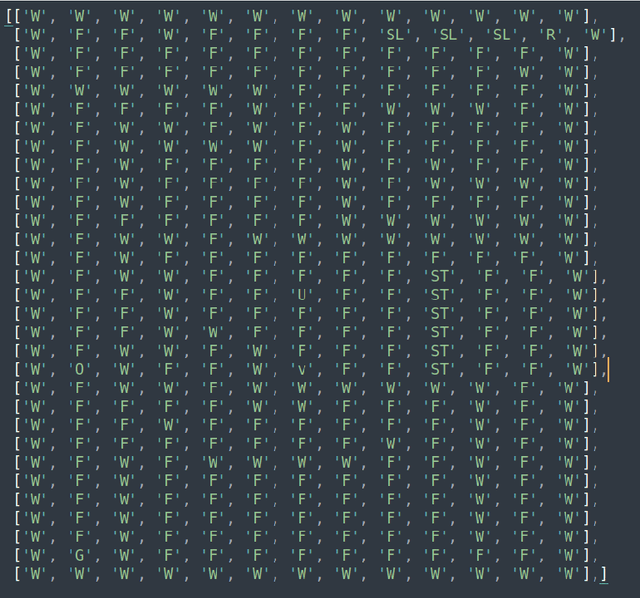
In this work we present a technique to select the best robot for accomplishing a task assuming that the map of the environment is known in advance. To do so, capabilities of the robots are listed and the environments where they can be used are mapped. There are five robots that included for doing the tasks. They are the robotic lizard, half-humanoid, robotic snake, biped and quadruped. Each of these robots are capable of performing certain activities and also they have their own limitations. The process of considering the robot performances and acting based on their limitations is the focus of this work. The wavefront algorithm is used to find the nature of terrain. Based on the terrain a suitable robot is selected from the list of five robots by the wavefront algorithm. Using this robot the mission is accomplished.