 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of On-Ground Hardware In Loop Simulation Facility for Space Robotics
Paper and Code
Jun 03, 2023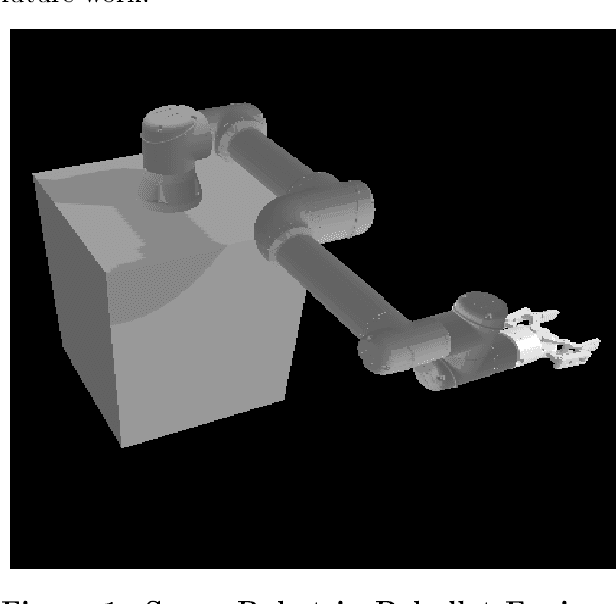
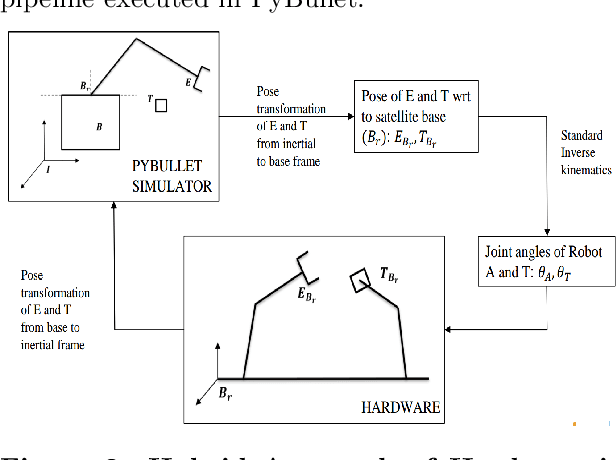
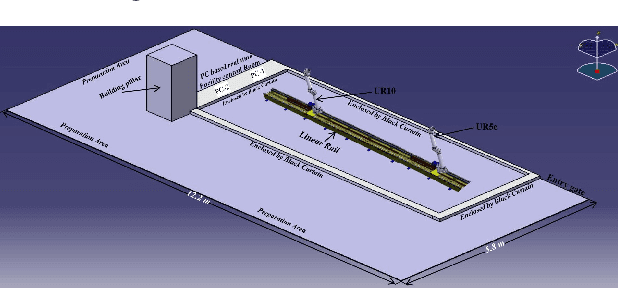
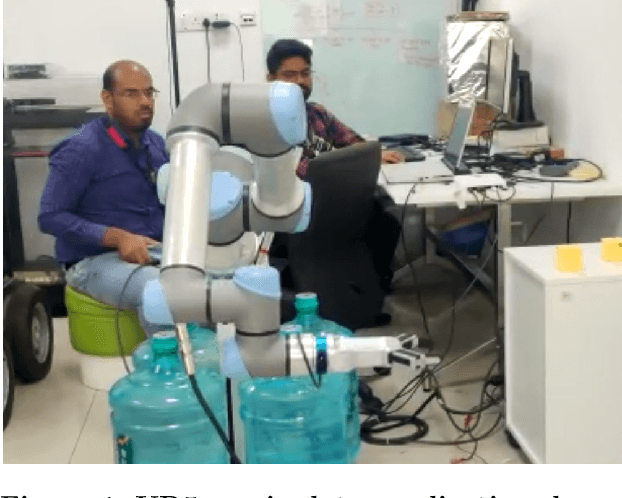
Over a couple of decades, space junk has increased rapidly, which has caused significant threats to the LEO operation satellites. An Active Debris Removal $(ADR)$ concept continuously evolves for space junk removal. One of the ADR methods is Space Robotics, whose function is to chase, capture and de-orbit the space junk. This paper presents the development of an on-ground space robotics facility in the TCS Research for on-orbit servicing $(OOS)$ like refueling and debris capture experiments. A Hardware in Loop Simulation (HILS) system will be used for integrated system development, testing, and demonstration of on-orbit docking mechanisms. The HiLS test facility of TCS Research Lab will use two URs in which one UR is attached to the RG2 gripper, and the other is attached to a force-torque sensor and with a scaled mock-up model. The first UR5 will be mounted on a 7-axis linear rail and contain the docking probe. First, UR5 with a suitable gripper has to interface its control boxes. The grasping algorithm was run through the ROS interface line to demonstrate and validate the on-orbit operations. The manipulator will be mounted with LIDAR and a camera to visualize the mock-up model, find the target model's pose and rotational velocity estimation, and a gripper that will move relative to the target model. The other manipulator has the UR10 control, providing rotational and random motion to the mockup, enabling a dynamic simulator fed by force-torque data. The dynamic simulator is fed up with the orbit propagator, which will provide the orbiting environment to the target model. For the simulation of the docking and grasping of the target model, a linear rail of a 6m setup is still in the procurement process. Once reaching proximity, the grasping algorithm will be launched to capture the target model after reading the random motion of the mock-up model.