 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Aerial Gripper for Passive Grasping and Impulsive Release using Scotch Yoke Mechanism
Dec 11, 2020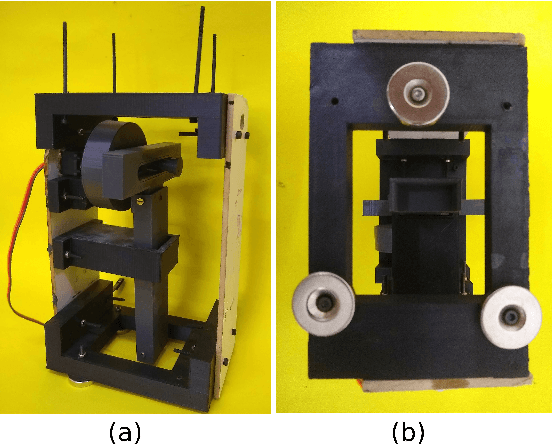
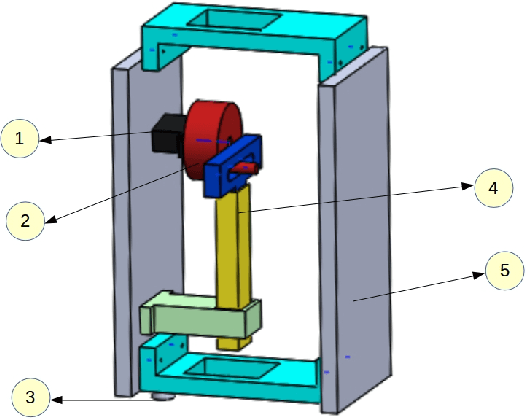

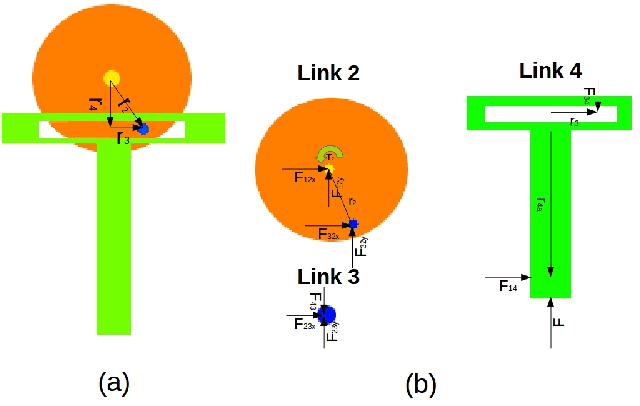
Aerial transportation requires a simple yet reliable gripper for picking and placing objects of interest. In this work, we design an aerial gripper for passive grasping and impulsive release of ferrous coated objects. Permanent magnets are used for passive grasping and the Scotch Yoke mechanism is used for providing impulsive force to drop the object. The load carrying capacity of the gripper is calculated theoretically and experimentally. The parameters such as the radius of the rotating disk and length of the slider in the Scotch Yoke mechanism were optimized using weighted geometric programming. The dimensions of the gripper mount were derived considering the various components of the gripper. The gripper was mounted on an Unmanned Aerial Vehicle (UAV) and the tests were done by carrying ferrous coated cuboid shaped objects of different sizes and masses. These tests were done in manual and autonomous mode in the outdoor environment.