 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-miniUGV Hybrid System for Hidden Area Exploration and Manipulation
Sep 23, 2022
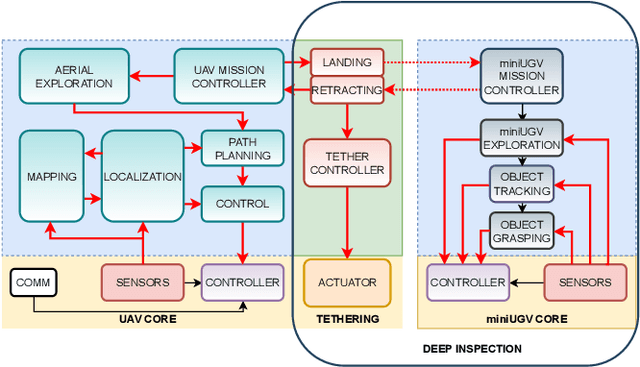
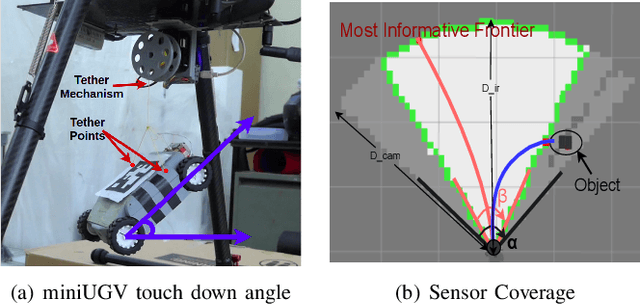
We propose a novel hybrid system (both hardware and software) of an Unmanned Aerial Vehicle (UAV) carrying a miniature Unmanned Ground Vehicle (miniUGV) to perform a complex search and manipulation task. This system leverages heterogeneous robots to accomplish a task that cannot be done using a single robot system. It enables the UAV to explore a hidden space with a narrow opening through which the miniUGV can easily enter and escape. The hidden space is assumed to be navigable for the miniUGV. The miniUGV uses Infrared (IR) sensors and a monocular camera to search for an object in the hidden space. The proposed system takes advantage of a wider field of view (fov) of the camera as well as the stochastic nature of the object detection algorithms to guide the miniUGV in the hidden space to find the object. Upon finding the object the miniUGV grabs it using visual servoing and then returns back to its start point from where the UAV retracts it back and transports the object to a safe place. In case there is no object found in the hidden space, UAV continues the aerial search. The tethered miniUGV gives the UAV an ability to act beyond its reach and perform a search and manipulation task which was not possible before for any of the robots individually. The system has a wide range of applications and we have demonstrated its feasibility through repetitive experiments.