 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Low Thrust Controlled Maneuvers to Chase and De-orbit the Space Debris
Paper and Code
Apr 01, 2022
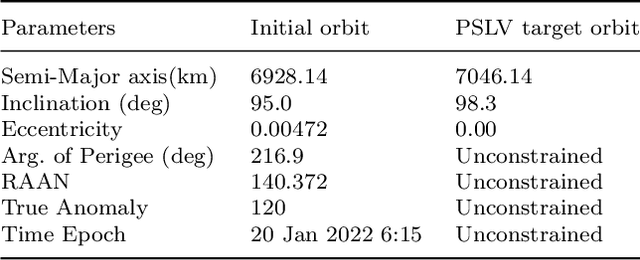
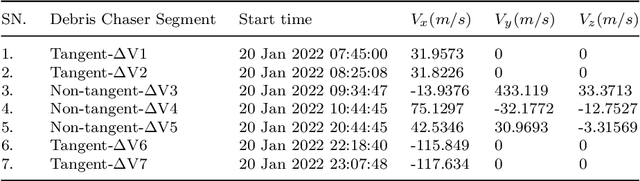
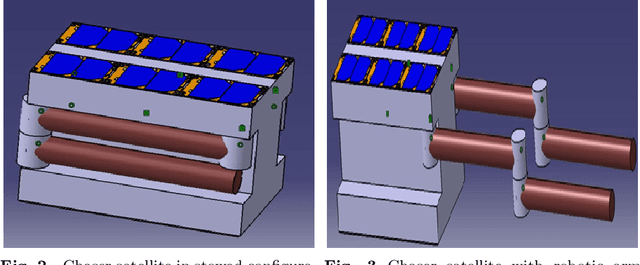
Over the several decades, the space debris at LEO has grown rapidly which had caused a serious threat to the operating satellite in an orbit. To avoid the risk of collision and protect the LEO environment, the space robotics ADR concept has been continuously developed for over a decade to chase, capture, and deorbit space debris. This paper presents the designed small satellite with dual robotic manipulators. The small satellite is designed based on CubeSat standards, which uses commercially available products in the market. In this paper, an approach is detailed for designing the controlled chase and deorbit maneuver for a small satellite equipped with an RCS thruster. The maneuvers are comprised of two phases, a. bringing the chaser satellite to the debris orbit and accelerating it to close proximity of 1m to the debris object by using the low thrust RCS thruster, and b. Once captured, controlled deorbiting it to 250 km of altitude. A Hohmann transfer concept is used to move our chaser satellite from the lower orbit to the debris orbit by two impulsive burns. A number of the scenarios are simulated, where one or more orbital elements are adjusted. For more than one orbital elements adjustment, the DAG law and the Q law are utilized. These laws synthesize the three direction thrusts to the single thrust force for the controlled maneuver. The $\Delta$V requirement at each maneuver is determined by using the performance parameters of the RCS thruster intended for a small satellite. The results show that, for long term simulation of a chaser satellite maneuver to debris object, an optimum DAG law is most suitable than the Q law, as it can handle the singularity behavior of the orbital elements caused due by adjustment of one or more elements more efficiently.