 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Based Control of Commercial-Off-TheShelf (COTS) Unmanned Rotorcraft for BrickWall Construction
Paper and Code
Mar 23, 2021
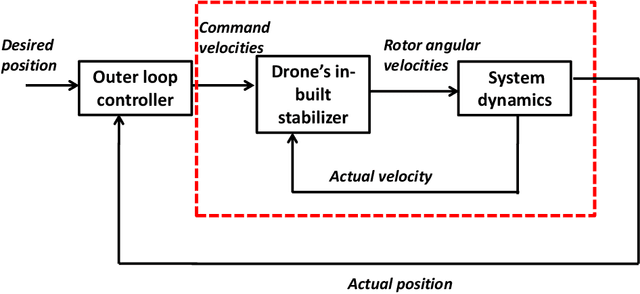

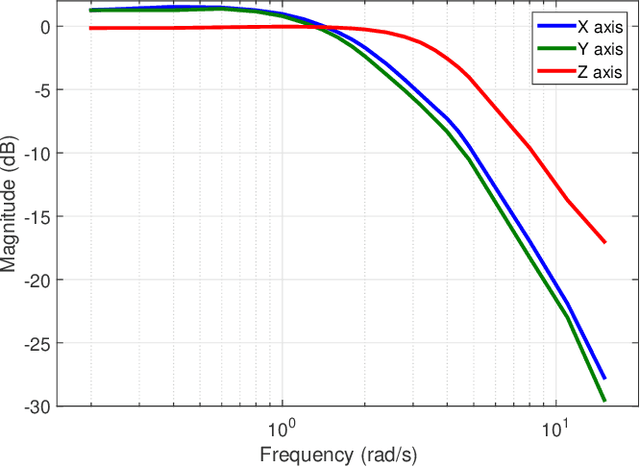
This work proposes a systematic framework for modelling and controller design of a Commercial-Off-The Shelf (COTS) unmanned rotorcraft using control theory and principles, for brick wall construction. With point to point navigation as the primary application, command velocities in the three axes of the Unmanned Aerial Vehicle (UAV) are considered as inputs of the system while its actual velocities are system outputs. Using the sine and step response data acquired from a Hardware-in-Loop (HiL) test simulator, the considered system was modelled in individual axes with the help of the proposed framework. This model was employed for controller design where a sliding mode controller was chosen to satisfy certain requirements of the application like robustness, flexibility and accuracy. The model was validated using step response data and produced a deviation of only 9%. Finally, the controller results from field test showed fine control up to 8 cms accuracy. Sliding Mode Control (SMC) was also compared with a linear controller derived from iterative experimentations and seen to perform better than the latter in terms of accuracy, and robustness to parametric variations and wind disturbances.