 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge-Assisted Accelerated Cooperative Sensing for CAVs: Task Placement and Resource Allocation
Nov 27, 2024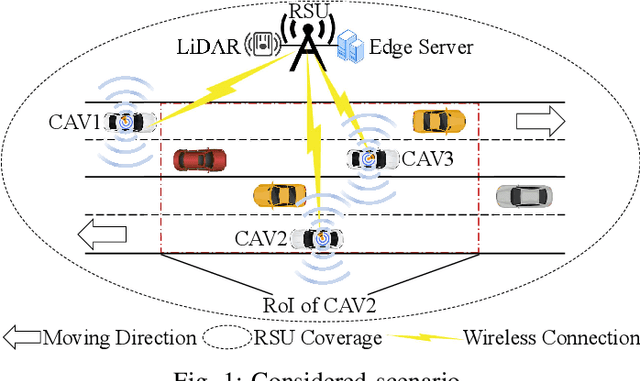
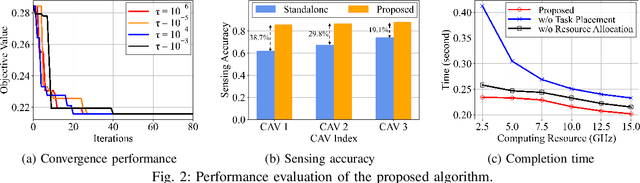
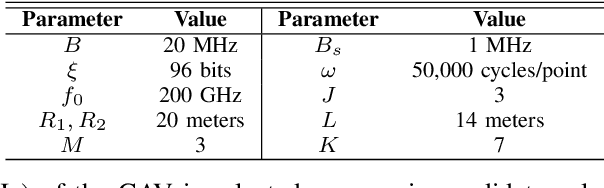
In this paper, we propose a novel road side unit (RSU)-assisted cooperative sensing scheme for connected autonomous vehicles (CAVs), with the objective to reduce completion time of sensing tasks. Specifically, LiDAR sensing data of both RSU and CAVs are selectively fused to improve sensing accuracy, and computing resources therein are cooperatively utilized to process tasks in real time. To this end, for each task, we decide whether to compute it at the CAV or at the RSU and allocate resources accordingly. We first formulate a joint task placement and resource allocation problem for minimizing the total task completion time while satisfying sensing accuracy constraint. We then decouple the problem into two subproblems and propose a two-layer algorithm to solve them. The outer layer first makes task placement decision based on the Gibbs sampling theory, while the inner layer makes spectrum and computing resource allocation decisions via greedy-based and convex optimization subroutines, respectively. Simulation results based on the autonomous driving simulator CARLA demonstrate the effectiveness of the proposed scheme in reducing total task completion time, comparing to benchmark schemes.
Meta Learning Based Adaptive Cooperative Perception in Nonstationary Vehicular Networks
Oct 01, 2024
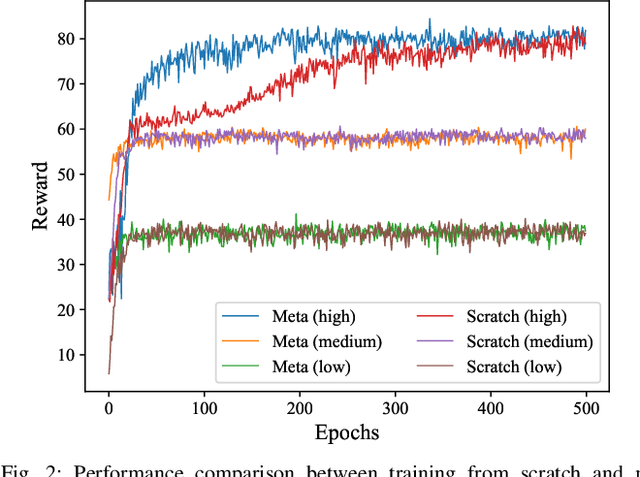
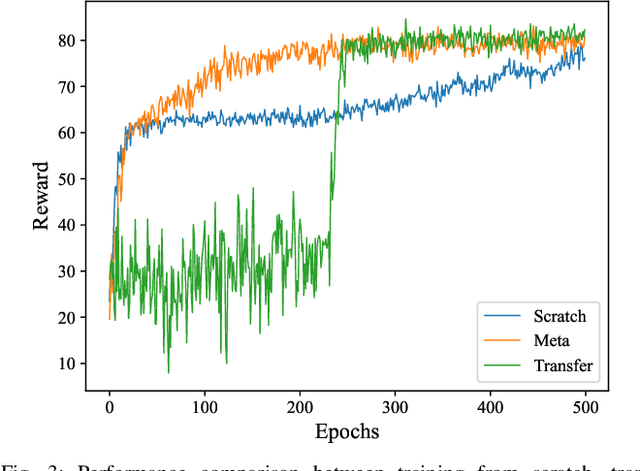
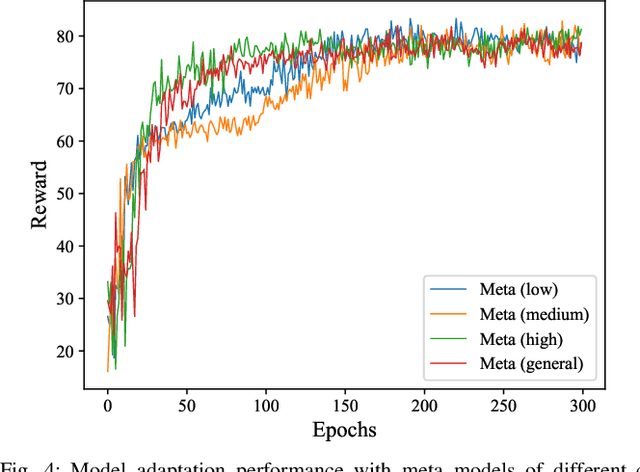
To accommodate high network dynamics in real-time cooperative perception (CP), reinforcement learning (RL) based adaptive CP schemes have been proposed, to allow adaptive switchings between CP and stand-alone perception modes among connected and autonomous vehicles. The traditional offline-training online-execution RL framework suffers from performance degradation under nonstationary network conditions. To achieve fast and efficient model adaptation, we formulate a set of Markov decision processes for adaptive CP decisions in each stationary local vehicular network (LVN). A meta RL solution is proposed, which trains a meta RL model that captures the general features among LVNs, thus facilitating fast model adaptation for each LVN with the meta RL model as an initial point. Simulation results show the superiority of meta RL in terms of the convergence speed without reward degradation. The impact of the customization level of meta models on the model adaptation performance has also been evaluated.
Accuracy-Aware Cooperative Sensing and Computing for Connected Autonomous Vehicles
Mar 25, 2024



To maintain high perception performance among connected and autonomous vehicles (CAVs), in this paper, we propose an accuracy-aware and resource-efficient raw-level cooperative sensing and computing scheme among CAVs and road-side infrastructure. The scheme enables fined-grained partial raw sensing data selection, transmission, fusion, and processing in per-object granularity, by exploiting the parallelism among object classification subtasks associated with each object. A supervised learning model is trained to capture the relationship between the object classification accuracy and the data quality of selected object sensing data, facilitating accuracy-aware sensing data selection. We formulate an optimization problem for joint sensing data selection, subtask placement and resource allocation among multiple object classification subtasks, to minimize the total resource cost while satisfying the delay and accuracy requirements. A genetic algorithm based iterative solution is proposed for the optimization problem. Simulation results demonstrate the accuracy awareness and resource efficiency achieved by the proposed cooperative sensing and computing scheme, in comparison with benchmark solutions.
Model-Assisted Learning for Adaptive Cooperative Perception of Connected Autonomous Vehicles
Jan 18, 2024


Cooperative perception (CP) is a key technology to facilitate consistent and accurate situational awareness for connected and autonomous vehicles (CAVs). To tackle the network resource inefficiency issue in traditional broadcast-based CP, unicast-based CP has been proposed to associate CAV pairs for cooperative perception via vehicle-to-vehicle transmission. In this paper, we investigate unicast-based CP among CAV pairs. With the consideration of dynamic perception workloads and channel conditions due to vehicle mobility and dynamic radio resource availability, we propose an adaptive cooperative perception scheme for CAV pairs in a mixed-traffic autonomous driving scenario with both CAVs and human-driven vehicles. We aim to determine when to switch between cooperative perception and stand-alone perception for each CAV pair, and allocate communication and computing resources to cooperative CAV pairs for maximizing the computing efficiency gain under perception task delay requirements. A model-assisted multi-agent reinforcement learning (MARL) solution is developed, which integrates MARL for an adaptive CAV cooperation decision and an optimization model for communication and computing resource allocation. Simulation results demonstrate the effectiveness of the proposed scheme in achieving high computing efficiency gain, as compared with benchmark schemes.
Digital Twin-Based User-Centric Edge Continual Learning in Integrated Sensing and Communication
Nov 20, 2023



In this paper, we propose a digital twin (DT)-based user-centric approach for processing sensing data in an integrated sensing and communication (ISAC) system with high accuracy and efficient resource utilization. The considered scenario involves an ISAC device with a lightweight deep neural network (DNN) and a mobile edge computing (MEC) server with a large DNN. After collecting sensing data, the ISAC device either processes the data locally or uploads them to the server for higher-accuracy data processing. To cope with data drifts, the server updates the lightweight DNN when necessary, referred to as continual learning. Our objective is to minimize the long-term average computation cost of the MEC server by optimizing two decisions, i.e., sensing data offloading and sensing data selection for the DNN update. A DT of the ISAC device is constructed to predict the impact of potential decisions on the long-term computation cost of the server, based on which the decisions are made with closed-form formulas. Experiments on executing DNN-based human motion recognition tasks are conducted to demonstrate the outstanding performance of the proposed DT-based approach in computation cost minimization.
Cost-Effective Two-Stage Network Slicing for Edge-Cloud Orchestrated Vehicular Networks
Dec 31, 2022
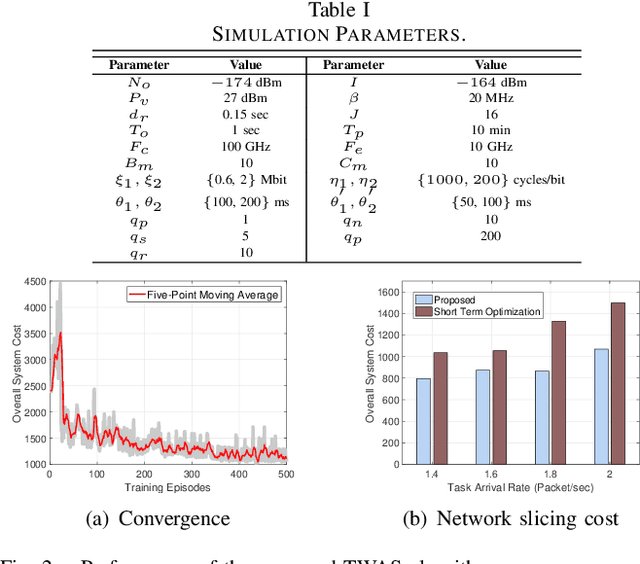
In this paper, we study a network slicing problem for edge-cloud orchestrated vehicular networks, in which the edge and cloud servers are orchestrated to process computation tasks for reducing network slicing cost while satisfying the quality of service requirements. We propose a two-stage network slicing framework, which consists of 1) network planning stage in a large timescale to perform slice deployment, edge resource provisioning, and cloud resource provisioning, and 2) network operation stage in a small timescale to perform resource allocation and task dispatching. Particularly, we formulate the network slicing problem as a two-timescale stochastic optimization problem to minimize the network slicing cost. Since the problem is NP-hard due to coupled network planning and network operation stages, we develop a Two timescAle netWork Slicing (TAWS) algorithm by collaboratively integrating reinforcement learning (RL) and optimization methods, which can jointly make network planning and operation decisions. Specifically, by leveraging the timescale separation property of decisions, we decouple the problem into a large-timescale network planning subproblem and a small-timescale network operation subproblem. The former is solved by an RL method, and the latter is solved by an optimization method. Simulation results based on real-world vehicle traffic traces show that the TAWS can effectively reduce the network slicing cost as compared to the benchmark scheme.