 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge-Assisted Accelerated Cooperative Sensing for CAVs: Task Placement and Resource Allocation
Paper and Code
Nov 27, 2024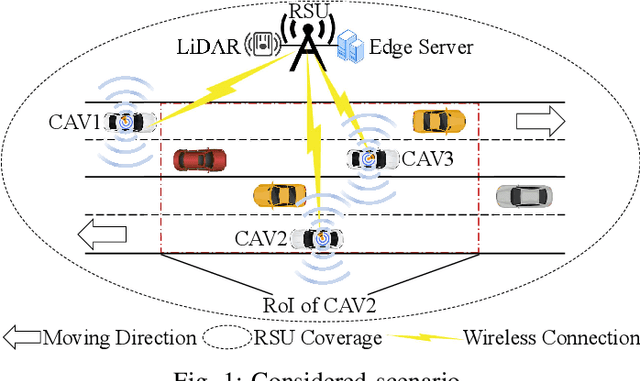
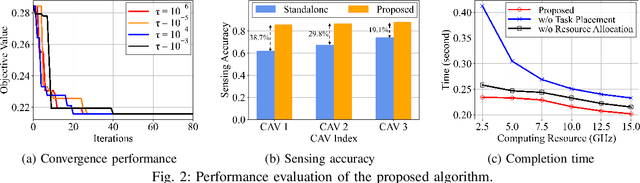
In this paper, we propose a novel road side unit (RSU)-assisted cooperative sensing scheme for connected autonomous vehicles (CAVs), with the objective to reduce completion time of sensing tasks. Specifically, LiDAR sensing data of both RSU and CAVs are selectively fused to improve sensing accuracy, and computing resources therein are cooperatively utilized to process tasks in real time. To this end, for each task, we decide whether to compute it at the CAV or at the RSU and allocate resources accordingly. We first formulate a joint task placement and resource allocation problem for minimizing the total task completion time while satisfying sensing accuracy constraint. We then decouple the problem into two subproblems and propose a two-layer algorithm to solve them. The outer layer first makes task placement decision based on the Gibbs sampling theory, while the inner layer makes spectrum and computing resource allocation decisions via greedy-based and convex optimization subroutines, respectively. Simulation results based on the autonomous driving simulator CARLA demonstrate the effectiveness of the proposed scheme in reducing total task completion time, comparing to benchmark schemes.