 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRTX: Efficient Ray Tracing for 3D Gaussian-Based Rendering
Jan 28, 20263D Gaussian Splatting has gained widespread adoption across diverse applications due to its exceptional rendering performance and visual quality. While most existing methods rely on rasterization to render Gaussians, recent research has started investigating ray tracing approaches to overcome the fundamental limitations inherent in rasterization. However, current Gaussian ray tracing methods suffer from inefficiencies such as bloated acceleration structures and redundant node traversals, which greatly degrade ray tracing performance. In this work, we present GRTX, a set of software and hardware optimizations that enable efficient ray tracing for 3D Gaussian-based rendering. First, we introduce a novel approach for constructing streamlined acceleration structures for Gaussian primitives. Our key insight is that anisotropic Gaussians can be treated as unit spheres through ray space transformations, which substantially reduces BVH size and traversal overhead. Second, we propose dedicated hardware support for traversal checkpointing within ray tracing units. This eliminates redundant node visits during multi-round tracing by resuming traversal from checkpointed nodes rather than restarting from the root node in each subsequent round. Our evaluation shows that GRTX significantly improves ray tracing performance compared to the baseline ray tracing method with a negligible hardware cost.
Optimal certification of constant-local Hamiltonians
Dec 10, 2025We study the problem of certifying local Hamiltonians from real-time access to their dynamics. Given oracle access to $e^{-itH}$ for an unknown $k$-local Hamiltonian $H$ and a fully specified target Hamiltonian $H_0$, the goal is to decide whether $H$ is exactly equal to $H_0$ or differs from $H_0$ by at least $\varepsilon$ in normalized Frobenius norm, while minimizing the total evolution time. We introduce the first intolerant Hamiltonian certification protocol that achieves optimal performance for all constant-locality Hamiltonians. For general $n$-qubit, $k$-local, traceless Hamiltonians, our procedure uses $O(c^k/\varepsilon)$ total evolution time for a universal constant $c$, and succeeds with high probability. In particular, for $O(1)$-local Hamiltonians, the total evolution time becomes $Θ(1/\varepsilon)$, matching the known $Ω(1/\varepsilon)$ lower bounds and achieving the gold-standard Heisenberg-limit scaling. Prior certification methods either relied on implementing inverse evolution of $H$, required controlled access to $e^{-itH}$, or achieved near-optimal guarantees only in restricted settings such as the Ising case ($k=2$). In contrast, our algorithm requires neither inverse evolution nor controlled operations: it uses only forward real-time dynamics and achieves optimal intolerant certification for all constant-locality Hamiltonians.
VR-Pipe: Streamlining Hardware Graphics Pipeline for Volume Rendering
Feb 24, 2025


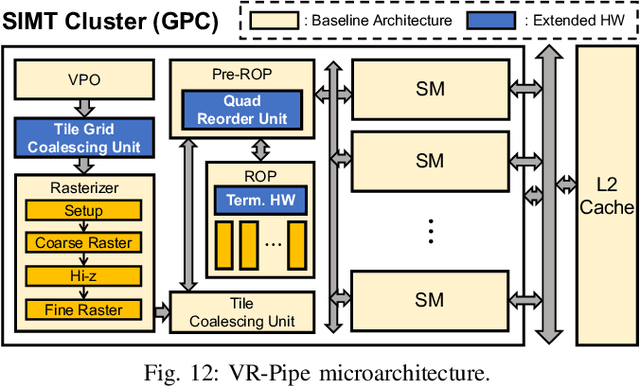
Graphics rendering that builds on machine learning and radiance fields is gaining significant attention due to its outstanding quality and speed in generating photorealistic images from novel viewpoints. However, prior work has primarily focused on evaluating its performance through software-based rendering on programmable shader cores, leaving its performance when exploiting fixed-function graphics units largely unexplored. In this paper, we investigate the performance implications of performing radiance field rendering on the hardware graphics pipeline. In doing so, we implement the state-of-the-art radiance field method, 3D Gaussian splatting, using graphics APIs and evaluate it across synthetic and real-world scenes on today's graphics hardware. Based on our analysis, we present VR-Pipe, which seamlessly integrates two innovations into graphics hardware to streamline the hardware pipeline for volume rendering, such as radiance field methods. First, we introduce native hardware support for early termination by repurposing existing special-purpose hardware in modern GPUs. Second, we propose multi-granular tile binning with quad merging, which opportunistically blends fragments in shader cores before passing them to fixed-function blending units. Our evaluation shows that VR-Pipe greatly improves rendering performance, achieving up to a 2.78x speedup over the conventional graphics pipeline with negligible hardware overhead.
Adversarial Environment Design via Regret-Guided Diffusion Models
Oct 25, 2024

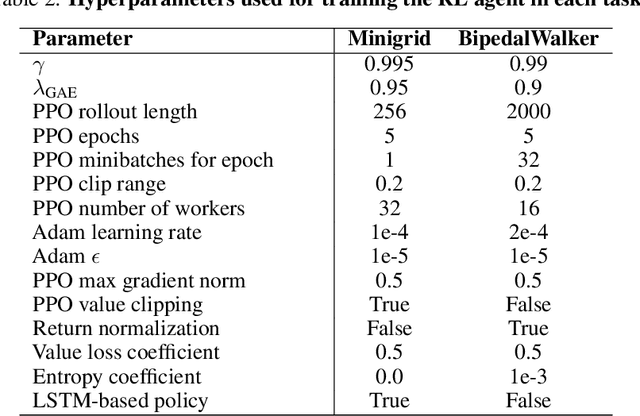

Training agents that are robust to environmental changes remains a significant challenge in deep reinforcement learning (RL). Unsupervised environment design (UED) has recently emerged to address this issue by generating a set of training environments tailored to the agent's capabilities. While prior works demonstrate that UED has the potential to learn a robust policy, their performance is constrained by the capabilities of the environment generation. To this end, we propose a novel UED algorithm, adversarial environment design via regret-guided diffusion models (ADD). The proposed method guides the diffusion-based environment generator with the regret of the agent to produce environments that the agent finds challenging but conducive to further improvement. By exploiting the representation power of diffusion models, ADD can directly generate adversarial environments while maintaining the diversity of training environments, enabling the agent to effectively learn a robust policy. Our experimental results demonstrate that the proposed method successfully generates an instructive curriculum of environments, outperforming UED baselines in zero-shot generalization across novel, out-of-distribution environments. Project page: https://github.com/rllab-snu.github.io/projects/ADD
Safe CoR: A Dual-Expert Approach to Integrating Imitation Learning and Safe Reinforcement Learning Using Constraint Rewards
Jul 02, 2024
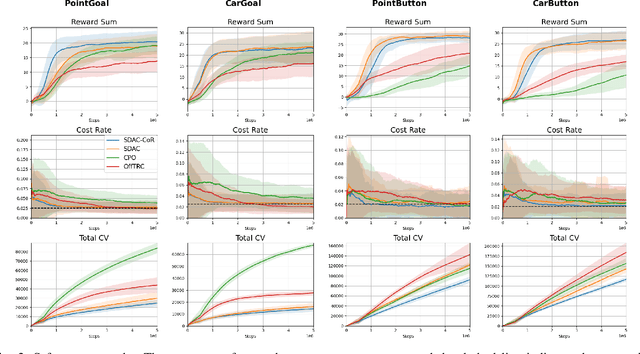

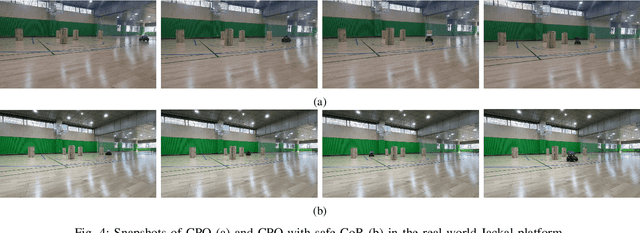
In the realm of autonomous agents, ensuring safety and reliability in complex and dynamic environments remains a paramount challenge. Safe reinforcement learning addresses these concerns by introducing safety constraints, but still faces challenges in navigating intricate environments such as complex driving situations. To overcome these challenges, we present the safe constraint reward (Safe CoR) framework, a novel method that utilizes two types of expert demonstrations$\unicode{x2013}$reward expert demonstrations focusing on performance optimization and safe expert demonstrations prioritizing safety. By exploiting a constraint reward (CoR), our framework guides the agent to balance performance goals of reward sum with safety constraints. We test the proposed framework in diverse environments, including the safety gym, metadrive, and the real$\unicode{x2013}$world Jackal platform. Our proposed framework enhances the performance of algorithms by $39\%$ and reduces constraint violations by $88\%$ on the real-world Jackal platform, demonstrating the framework's efficacy. Through this innovative approach, we expect significant advancements in real-world performance, leading to transformative effects in the realm of safe and reliable autonomous agents.
Mutual Information Maximizing Quantum Generative Adversarial Network and Its Applications in Finance
Sep 04, 2023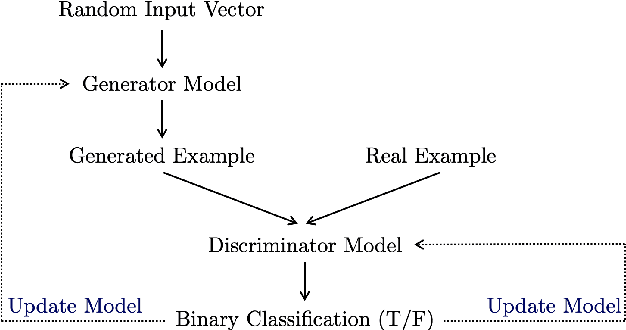
One of the most promising applications in the era of NISQ (Noisy Intermediate-Scale Quantum) computing is quantum machine learning. Quantum machine learning offers significant quantum advantages over classical machine learning across various domains. Specifically, generative adversarial networks have been recognized for their potential utility in diverse fields such as image generation, finance, and probability distribution modeling. However, these networks necessitate solutions for inherent challenges like mode collapse. In this study, we capitalize on the concept that the estimation of mutual information between high-dimensional continuous random variables can be achieved through gradient descent using neural networks. We introduce a novel approach named InfoQGAN, which employs the Mutual Information Neural Estimator (MINE) within the framework of quantum generative adversarial networks to tackle the mode collapse issue. Furthermore, we elaborate on how this approach can be applied to a financial scenario, specifically addressing the problem of generating portfolio return distributions through dynamic asset allocation. This illustrates the potential practical applicability of InfoQGAN in real-world contexts.