 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRTX: Efficient Ray Tracing for 3D Gaussian-Based Rendering
Jan 28, 20263D Gaussian Splatting has gained widespread adoption across diverse applications due to its exceptional rendering performance and visual quality. While most existing methods rely on rasterization to render Gaussians, recent research has started investigating ray tracing approaches to overcome the fundamental limitations inherent in rasterization. However, current Gaussian ray tracing methods suffer from inefficiencies such as bloated acceleration structures and redundant node traversals, which greatly degrade ray tracing performance. In this work, we present GRTX, a set of software and hardware optimizations that enable efficient ray tracing for 3D Gaussian-based rendering. First, we introduce a novel approach for constructing streamlined acceleration structures for Gaussian primitives. Our key insight is that anisotropic Gaussians can be treated as unit spheres through ray space transformations, which substantially reduces BVH size and traversal overhead. Second, we propose dedicated hardware support for traversal checkpointing within ray tracing units. This eliminates redundant node visits during multi-round tracing by resuming traversal from checkpointed nodes rather than restarting from the root node in each subsequent round. Our evaluation shows that GRTX significantly improves ray tracing performance compared to the baseline ray tracing method with a negligible hardware cost.
VR-Pipe: Streamlining Hardware Graphics Pipeline for Volume Rendering
Feb 24, 2025


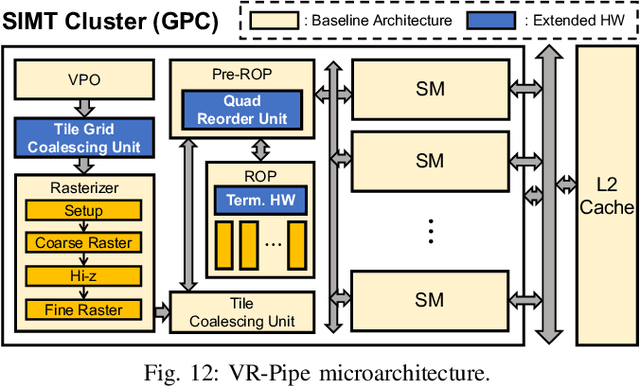
Graphics rendering that builds on machine learning and radiance fields is gaining significant attention due to its outstanding quality and speed in generating photorealistic images from novel viewpoints. However, prior work has primarily focused on evaluating its performance through software-based rendering on programmable shader cores, leaving its performance when exploiting fixed-function graphics units largely unexplored. In this paper, we investigate the performance implications of performing radiance field rendering on the hardware graphics pipeline. In doing so, we implement the state-of-the-art radiance field method, 3D Gaussian splatting, using graphics APIs and evaluate it across synthetic and real-world scenes on today's graphics hardware. Based on our analysis, we present VR-Pipe, which seamlessly integrates two innovations into graphics hardware to streamline the hardware pipeline for volume rendering, such as radiance field methods. First, we introduce native hardware support for early termination by repurposing existing special-purpose hardware in modern GPUs. Second, we propose multi-granular tile binning with quad merging, which opportunistically blends fragments in shader cores before passing them to fixed-function blending units. Our evaluation shows that VR-Pipe greatly improves rendering performance, achieving up to a 2.78x speedup over the conventional graphics pipeline with negligible hardware overhead.
Dynamic Humanoid Locomotion over Uneven Terrain With Streamlined Perception-Control Pipeline
Nov 30, 2020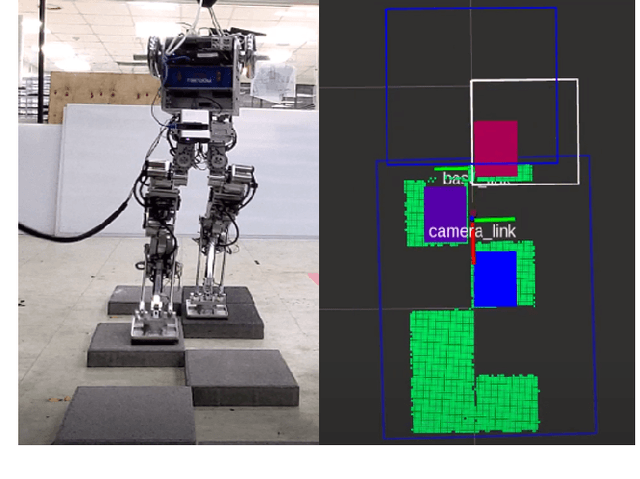
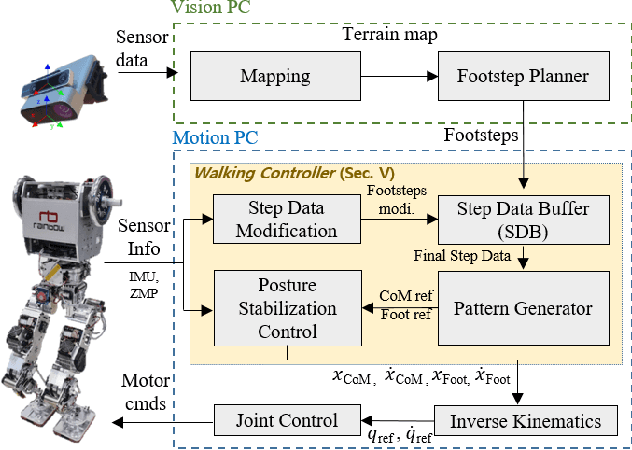
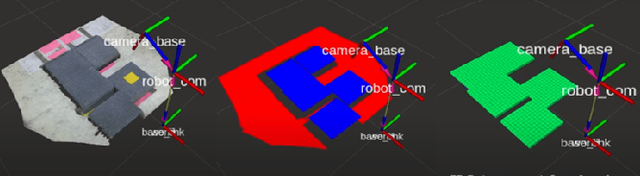
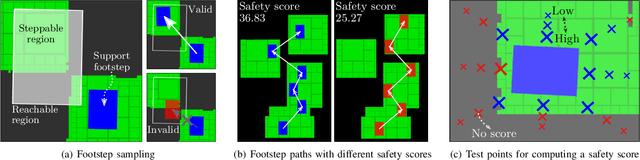
Although bipedal locomotion provides the ability to traverse unstructured environments, it requires careful planning and control to safely walk across without falling. This poses an integrated challenge for the robot to perceive, plan, and control its movements, especially with dynamic motions where the robot may have to adapt its swing-leg trajectory onthe-fly in order to safely place its foot on the uneven terrain. In this paper we present an efficient geometric footstep planner and the corresponding walking controller that enables a humanoid robot to dynamically walk across uneven terrain at speeds up to 0.3 m/s. As dynamic locomotion, we refer first to the continuous walking motion without stopping, and second to the on-the-fly replanning of the landing footstep position in middle of the swing phase during the robot gait cycle. This is mainly achieved through the streamlined integration between an efficient sampling-based planner and robust walking controller. The footstep planner is able to generate feasible footsteps within 5 milliseconds, and the controller is able to generate a new corresponding swing leg trajectory as well as the wholebody motion to dynamically balance the robot to the newly updated footsteps. The proposed perception-control pipeline is evaluated and demonstrated with real experiments using a fullscale humanoid to traverse across uneven terrains featured by static stepping stones, dynamically movable stepping stone, or narrow path.