 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit LiDAR Network: LiDAR Super-Resolution via Interpolation Weight Prediction
Mar 12, 2022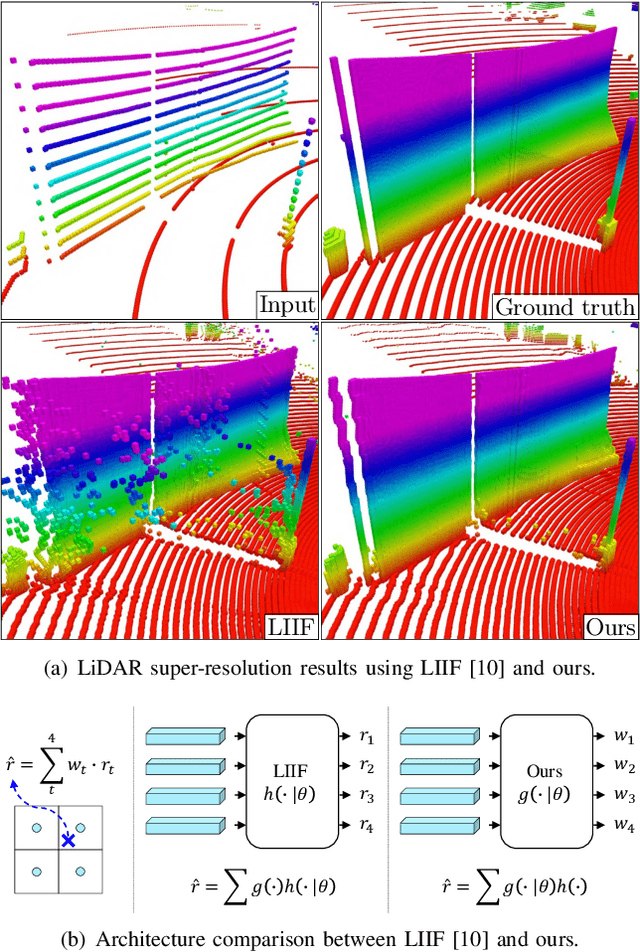


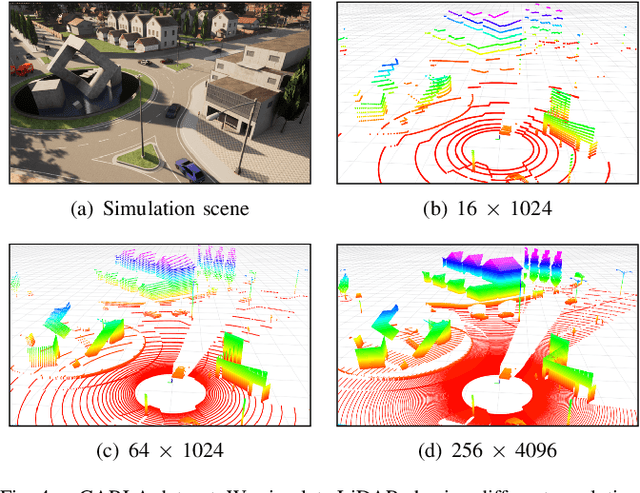
Super-resolution of LiDAR range images is crucial to improving many downstream tasks such as object detection, recognition, and tracking. While deep learning has made a remarkable advances in super-resolution techniques, typical convolutional architectures limit upscaling factors to specific output resolutions in training. Recent work has shown that a continuous representation of an image and learning its implicit function enable almost limitless upscaling. However, the detailed approach, predicting values (depths) for neighbor pixels in the input and then linearly interpolating them, does not best fit the LiDAR range images since it does not fill the unmeasured details but creates a new image with regression in a high-dimensional space. In addition, the linear interpolation blurs sharp edges providing important boundary information of objects in 3-D points. To handle these problems, we propose a novel network, Implicit LiDAR Network (ILN), which learns not the values per pixels but weights in the interpolation so that the superresolution can be done by blending the input pixel depths but with non-linear weights. Also, the weights can be considered as attentions from the query to the neighbor pixels, and thus an attention module in the recent Transformer architecture can be leveraged. Our experiments with a novel large-scale synthetic dataset demonstrate that the proposed network reconstructs more accurately than the state-of-the-art methods, achieving much faster convergence in training.
Dynamic Humanoid Locomotion over Uneven Terrain With Streamlined Perception-Control Pipeline
Nov 30, 2020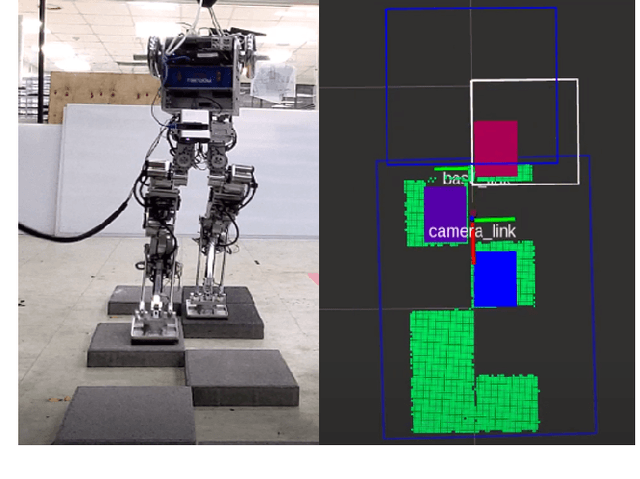
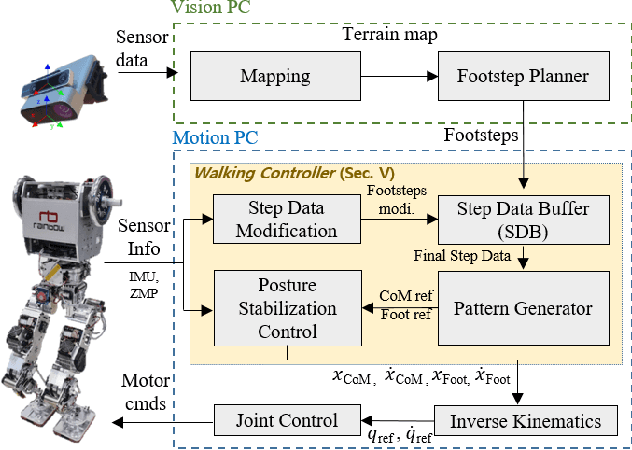
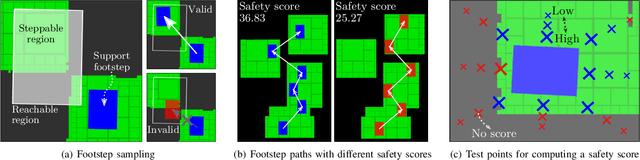
Although bipedal locomotion provides the ability to traverse unstructured environments, it requires careful planning and control to safely walk across without falling. This poses an integrated challenge for the robot to perceive, plan, and control its movements, especially with dynamic motions where the robot may have to adapt its swing-leg trajectory onthe-fly in order to safely place its foot on the uneven terrain. In this paper we present an efficient geometric footstep planner and the corresponding walking controller that enables a humanoid robot to dynamically walk across uneven terrain at speeds up to 0.3 m/s. As dynamic locomotion, we refer first to the continuous walking motion without stopping, and second to the on-the-fly replanning of the landing footstep position in middle of the swing phase during the robot gait cycle. This is mainly achieved through the streamlined integration between an efficient sampling-based planner and robust walking controller. The footstep planner is able to generate feasible footsteps within 5 milliseconds, and the controller is able to generate a new corresponding swing leg trajectory as well as the wholebody motion to dynamically balance the robot to the newly updated footsteps. The proposed perception-control pipeline is evaluated and demonstrated with real experiments using a fullscale humanoid to traverse across uneven terrains featured by static stepping stones, dynamically movable stepping stone, or narrow path.
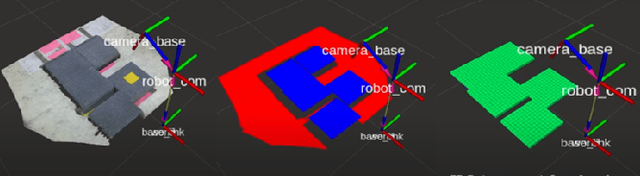
Real-time 3-D Mapping with Estimating Acoustic Materials
Sep 16, 2019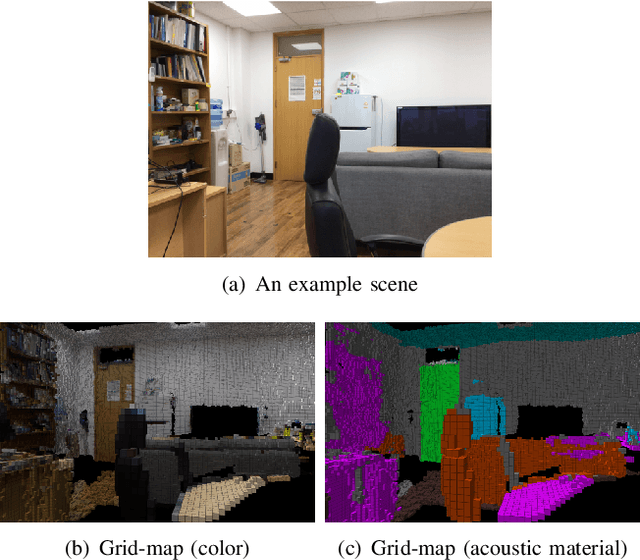
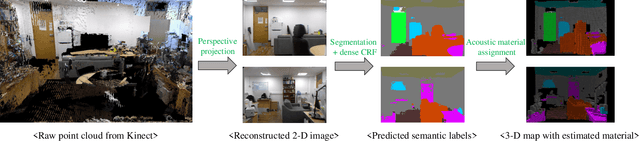
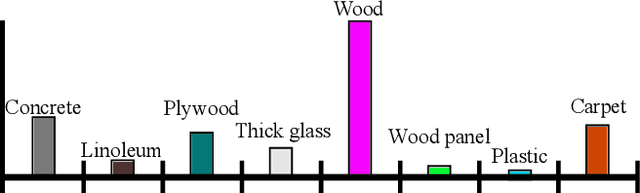
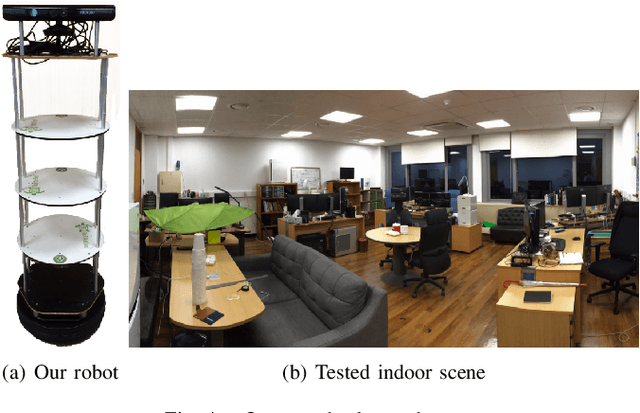
This paper proposes a real-time system integrating an acoustic material estimation from visual appearance and an on-the-fly mapping in the 3-dimension. The proposed method estimates the acoustic materials of surroundings in indoor scenes and incorporates them to a 3-D occupancy map, as a robot moves around the environment. To estimate the acoustic material from the visual cue, we apply the state-of-the-art semantic segmentation CNN network based on the assumption that the visual appearance and the acoustic materials have a strong association. Furthermore, we introduce an update policy to handle the material estimations during the online mapping process. As a result, our environment map with acoustic material can be used for sound-related robotics applications, such as sound source localization taking into account various acoustic propagation (e.g., reflection).
An Objectness Score for Accurate and Fast Detection during Navigation
Aug 26, 2019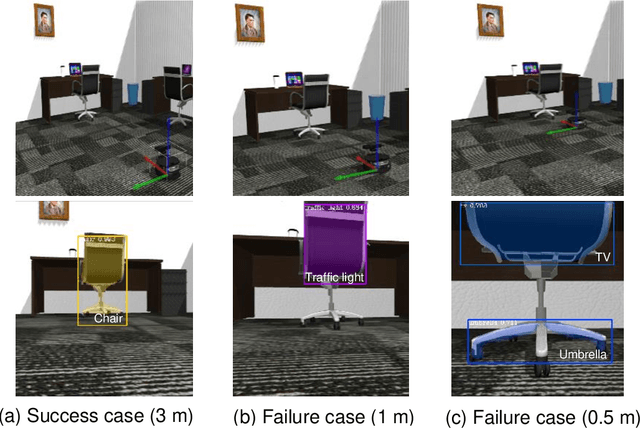
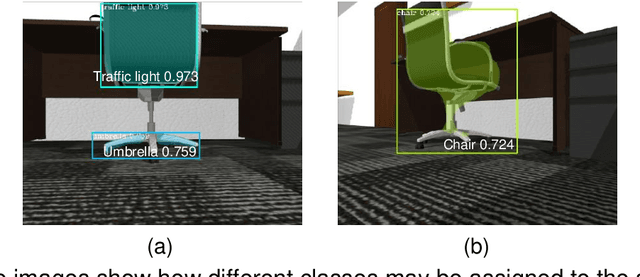
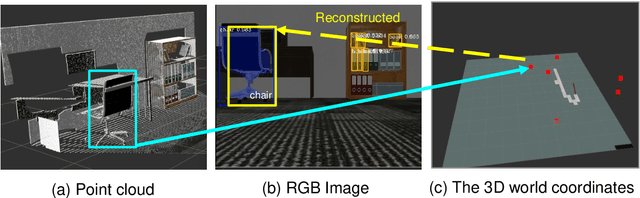
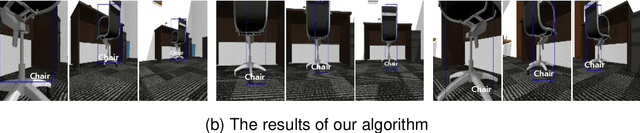
We propose a novel method utilizing an objectness score for maintaining the locations and classes of objects detected from Mask R-CNN during mobile robot navigation. The objectness score is defined to measure how well the detector identifies the locations and classes of objects during navigation. Specifically, it is designed to increase when there is sufficient distance between a detected object and the camera. During the navigation process, we transform the locations of objects in 3D world coordinates into 2D image coordinates through an affine projection and decide whether to retain the classes of detected objects using the objectness score. We conducted experiments to determine how well the locations and classes of detected objects are maintained at various angles and positions. Experimental results showed that our approach is efficient and robust, regardless of changing angles and distances.