 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time 3-D Mapping with Estimating Acoustic Materials
Paper and Code
Sep 16, 2019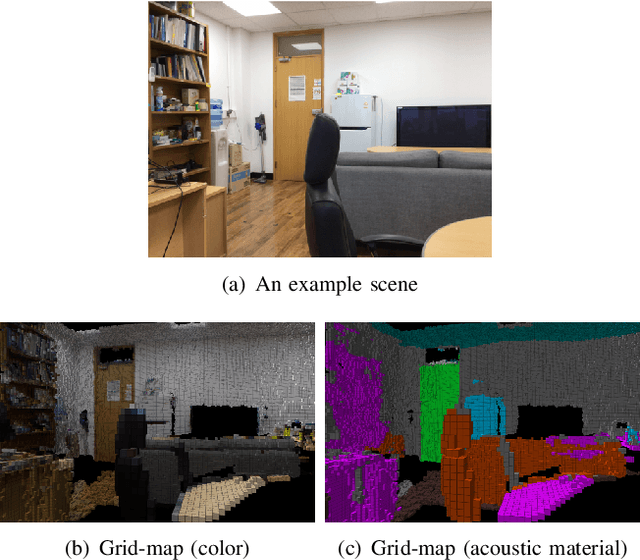
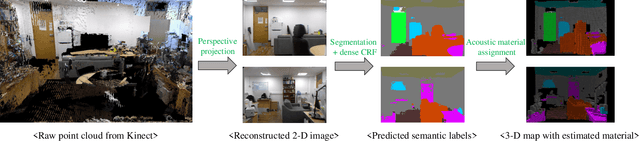
This paper proposes a real-time system integrating an acoustic material estimation from visual appearance and an on-the-fly mapping in the 3-dimension. The proposed method estimates the acoustic materials of surroundings in indoor scenes and incorporates them to a 3-D occupancy map, as a robot moves around the environment. To estimate the acoustic material from the visual cue, we apply the state-of-the-art semantic segmentation CNN network based on the assumption that the visual appearance and the acoustic materials have a strong association. Furthermore, we introduce an update policy to handle the material estimations during the online mapping process. As a result, our environment map with acoustic material can be used for sound-related robotics applications, such as sound source localization taking into account various acoustic propagation (e.g., reflection).